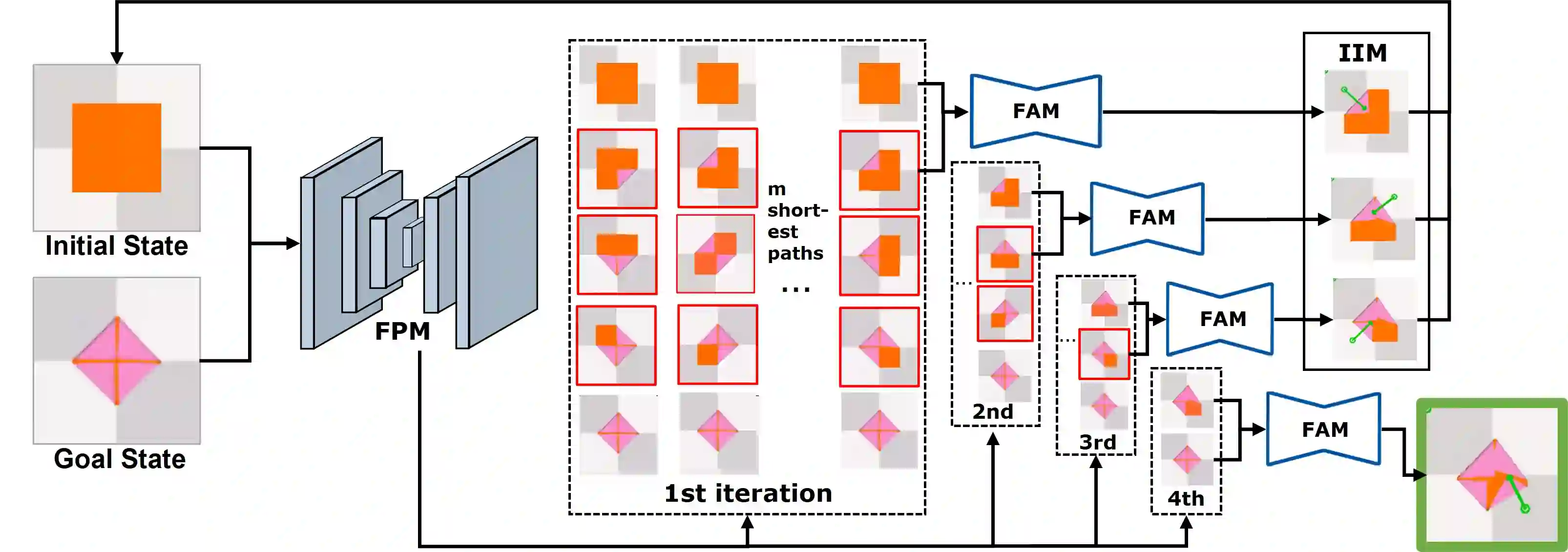
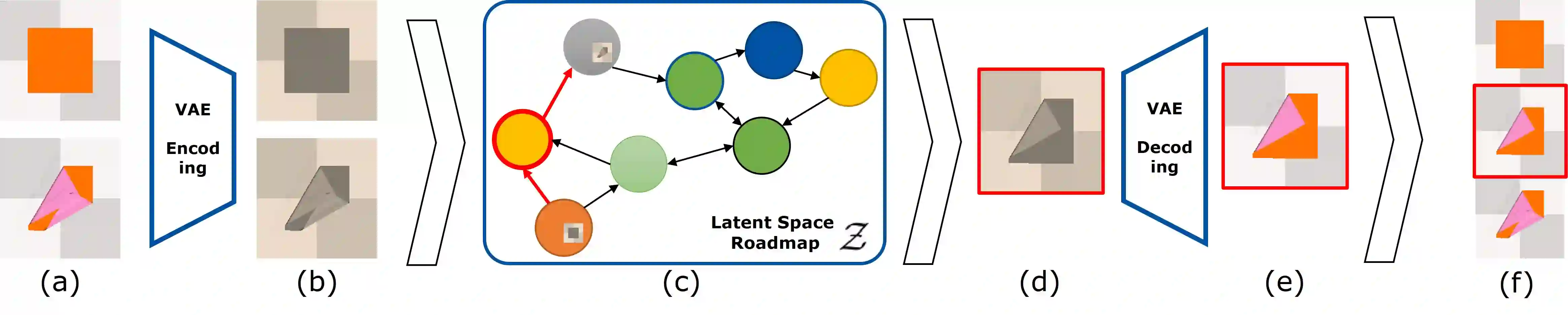
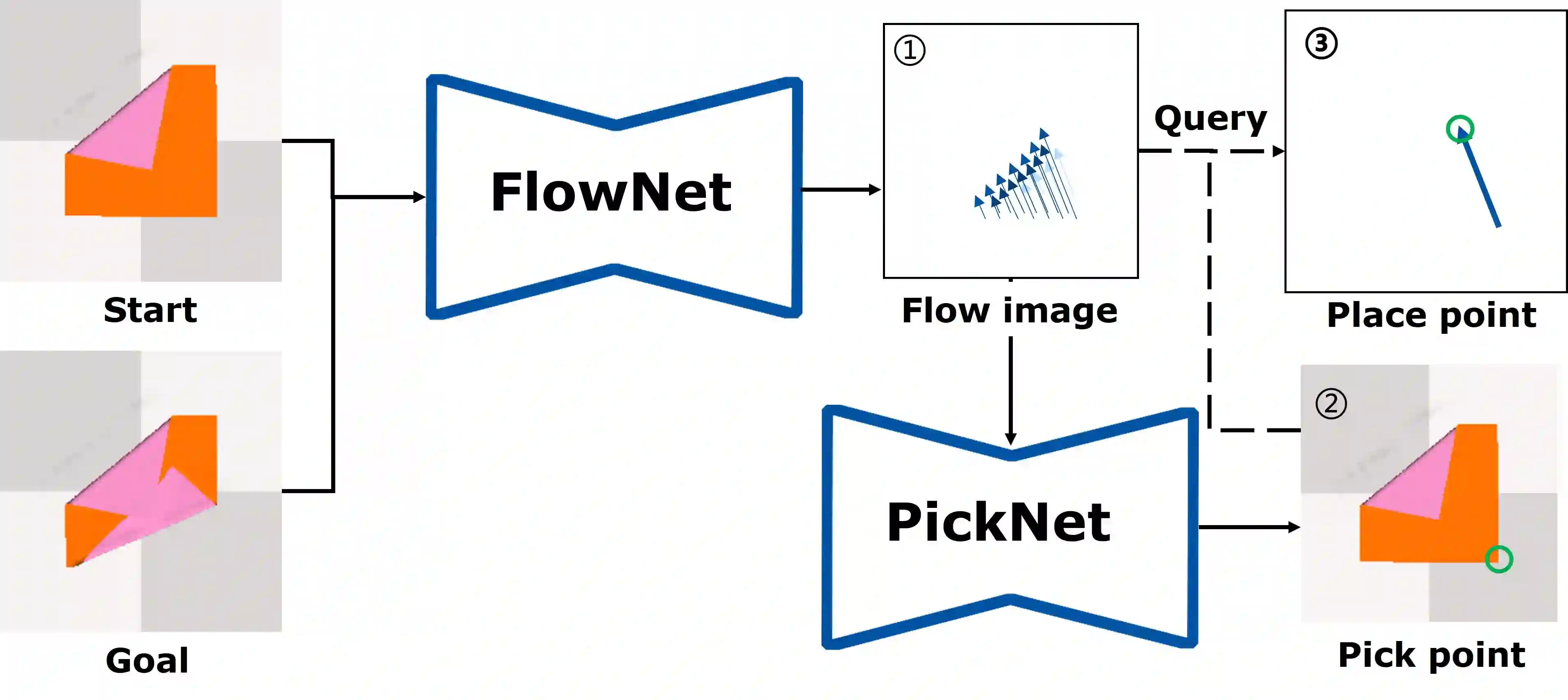
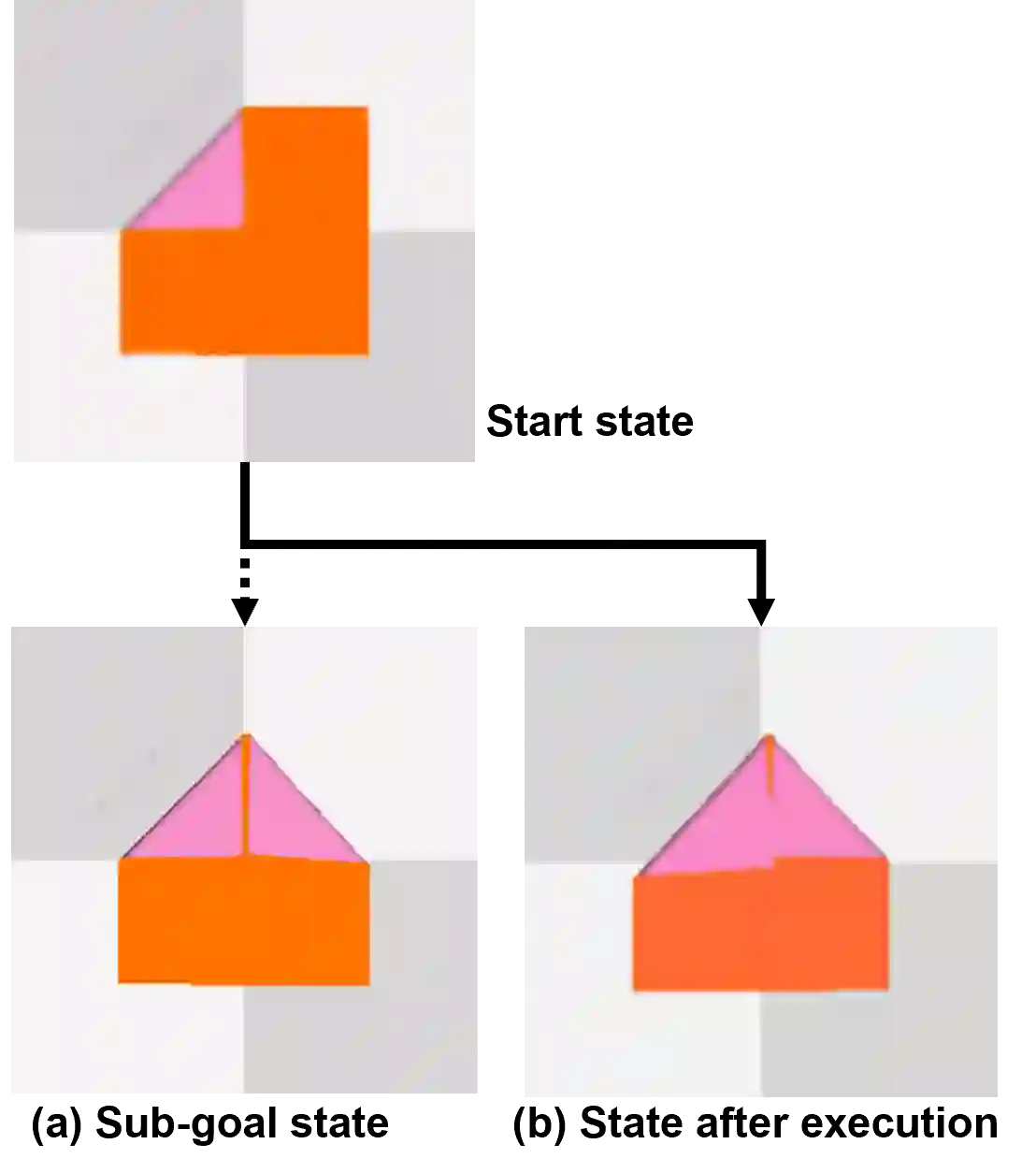
Fabric folding through robots is complex and challenging due to the deformability of fabric. Based on deconstruction strategy, we split the complex fabric folding task into three relatively simple sub-tasks, and propose a Deconstructed Fabric Folding Network (DeFNet), including corresponding three modules to solve them. (1) We use the Folding Planning Module (FPM), which is based on Latent Space Roadmap, to infer the most straight folding intermediate states from the start to the goal in latent space. (2) We utilize the flow-based approach, Folding Action Module (FAM), to calculate the action coordinates and execute them to reach the inferred intermediate state. (3) We introduce an Iterative Interactive Module (IIM) for fabric folding tasks, which can iteratively execute the FPM and FAM after every grasp-and-place action until the fabric reaches the goal. Experimentally, We demonstrated our method on multi-step fabric folding tasks against three baselines in simulation. We also apply the method to an existing robotic system and present its performance.
翻译:通过机器人折叠织物因其可变形性而复杂且具有挑战性。基于解构策略,我们将复杂的织物折叠任务分解为三个相对简单的子任务,并提出了一种解构织物折叠网络(DeFNet),包含三个对应模块来解决这些子任务。(1)我们使用基于潜在空间路径规划的折叠规划模块(FPM),在潜在空间中推断从起始状态到目标状态的最直接折叠中间状态。(2)我们采用基于流的方法——折叠动作模块(FAM),计算动作坐标并执行以达到推断的中间状态。(3)我们引入用于织物折叠任务的迭代交互模块(IIM),该模块可在每次抓取放置动作后迭代执行FPM和FAM,直至织物达到目标状态。实验中,我们在多步织物折叠任务上针对三个基线方法进行了仿真验证。我们还将该方法应用于现有机器人系统,并展示了其性能。