
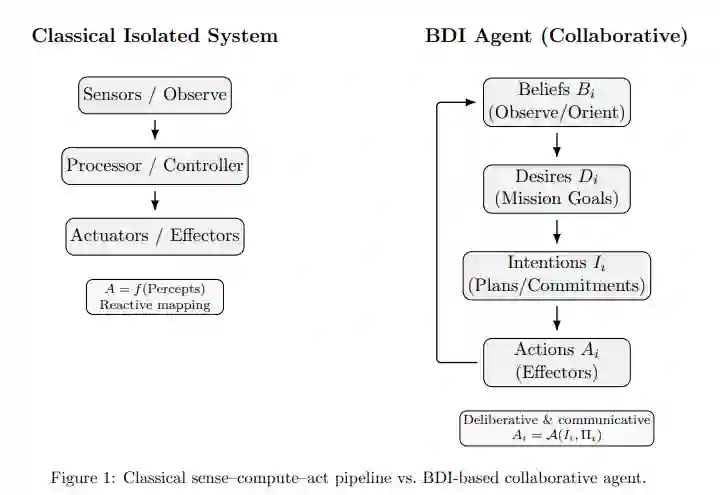
未来空战的胜负将不取决于单个平台的性能,而取决于分布式认知系统的一致性、韧性和作战节奏。有人与无人航空器必须作为一个在不确定性、间歇性连通和对抗干扰下运作的异质智能体协同网络,进行感知、推理和行动。本文为协同空战中的共享代理建立了一个统一的科学框架,该框架整合了博伊德的OODA动态、恩德斯利式态势感知、信念-愿望-意图形式化模型以及现代多智能体决策理论。
引入了一个协同认知的不变量——共享代理状态Σ(t) = 〈B*,D*,I*〉,它捕捉了智能体在保持全局一致性的同时进行本地行动所需的最低限度的信念、愿望和意图重叠。为受限通信下的意图对齐提供了形式化定义、收敛条件和互信息阈值。提出了一个分层参考架构,将通信、感知、规划和意图合成映射到可度量的性能和韧性指标。进一步推导了通信完整性、感知一致性、决策一致性和自主恢复能力的定量指标,并扩展了适应性和灵活性增益。这些指标被纳入一个通用的作战增益函数,将认知韧性与任务成果联系起来。
所得理论提供了:1. 基于意图的指挥控制的严格科学基础;2. 对抗环境中分布式自主性的原则性设计空间;3. 本地智能体认知与全局作战优势之间的可度量桥梁。该框架可直接应用于新兴项目,如欧洲协同空战标准化倡议、美国空军协同作战飞机、国防高级研究计划局空战演进项目以及北约多域任务系统。
空战正在经历从平台中心作战到分布式、以意图为中心的系统之系统的相变。现代协同空战涉及由有人和无人航空器组成的异质编队,其有效性较少依赖原始感知或机动能力,而更多取决于分布式认知的一致性。在通信对抗、模糊性和对抗干扰下,决定性的资源是智能体维持重叠信念、对齐目标和兼容意图的能力——称之为共享代理。传统的空战模型侧重于态势感知和博伊德的OODA循环。孤立地看,这些框架描述的是个体认知循环,而非多个此类循环如何在分布式编队中同步。相反,现代多智能体系统研究为推理、协调与合作提供了形式化结构,但缺乏与军事指挥控制的条令和时效性要求的映射。
本文将这两大传统整合到一个统一的协同空战科学模型中。中心论点是,意图一致性——即智能体信念、愿望和意图的对齐——是分布式任务有效性的首要决定因素。通过以下方式将其形式化:
• 共享代理状态的数学定义;
• 认知对齐的信息论阈值;
• 在时变、间歇连通的通信图上意图传播的收敛条件;
• 具有可度量、受安全性约束接口的分层架构;
• 量化对抗扰动下鲁棒性的韧性指标;
• 将认知与战场节奏联系起来的作战增益函数。
经典模型是线性的——BDI模型将认知和通信嵌入递归推理中,使得分布式人工智能能够在没有显式中央控制的情况下应用于自适应协同。
除了理论贡献之外,该框架的构建还旨在直接适用于当前进行中的项目,例如欧洲协同空战标准化倡议、美国空军协同作战飞机项目、国防高级研究计划局空战演进项目、北约网络使能作战,以及无人机或现代软件定义航空器的发展——后者是一个新兴概念,它使用软件来抽象和控制航空器的功能,摆脱传统的依赖硬件的系统。
本文余下部分结构如下。第2节介绍数学预备知识和建模假设。第3节将智能体、共享认知和意图一致性形式化。第4节分析不确定性下的通信、对齐动态和收敛性。第5节引入韧性理论和作战增益模型。第6节为在协同空战中实现分布式智能提供一个参考架构。第7节将其与统一的时间概念联系起来,并以对现代战场和未来研究方向的启示作为结论。
与信息时间理论的关系。 当前工作的一个互补性理论基础在“迈向统一的时间理论:时间作为跨因果接口的单调信息流”一文中提供。该理论将时间解释为跨因果边界的单调信息精化。本文开发的分布式认知模型是该框架的一个直接的操作性实例:共享代理对应于一个正在精化的信息状态,智能体间的通信形成因果接口,而OODA节奏则成为信息精化的速率。这一关联在第7节中明确阐述。

