
人工智能的快速演进已开启了一个将计算能力与人类决策相融合的集成系统新时代。本文提出“协调式分布式智能”这一新范式,它重新定义了人工智能——不再是孤立的自主智能体,而是与人类专业知识协同工作的、协调一致的网络。ODI利用先进的协调层、多环反馈机制和高认知密度框架,将静态的记录保管系统转变为动态的、面向行动的环境。通过对多智能体系统文献、最新技术进步和行业论坛实践见解的全面回顾,我们认为人工智能的未来在于将分布式智能集成到以人为中心的工作流程中。这种方法不仅提升了运营效率和战略敏捷性,还解决了与可扩展性、透明度和伦理决策相关的挑战。我们的工作概述了关键理论意义,并为未来的研究和企业创新提供了实用路线图,旨在为负责任的、自适应性的人工智能系统铺平道路,从而在人类组织中推动可持续创新。
过去十年间人工智能的快速演进重塑了我们的技术能力和文化期望。人工智能系统最初设计用于执行狭隘的、孤立的任务,如今正发展为能够承担复杂、多功能角色的集成框架。本文的动机源于弥合人工智能与人类智能之间差距的需求——将人工智能的计算优势与人类决策的细致判断相结合。最终,这种集成推动我们从静态的记录保管系统向动态的、面向行动的环境转型。
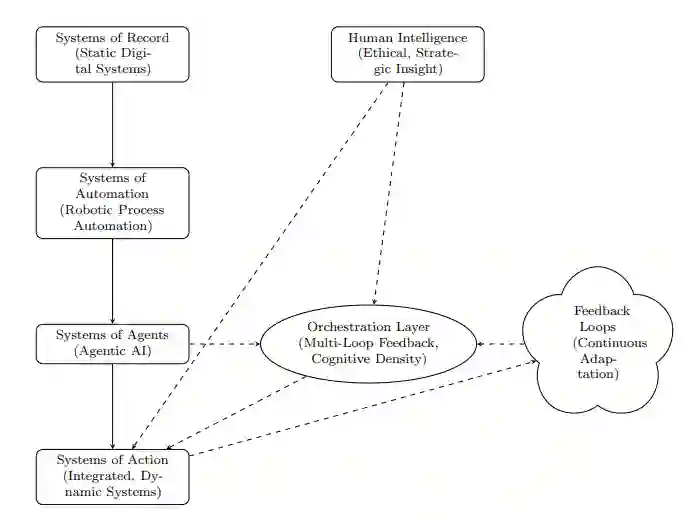
在此背景下,我们引入了“协调式分布式智能”的概念——一种新颖的范式,它将人工智能重新定义为一个集成的、协调的系统,其中智能既分布于多个人工智能组件之中,又得到系统性协调,而非仅仅是孤立智能体的集合。ODI代表了分布式自主人工智能与集中式协调层的融合,实现了与人类监督紧密契合的实时、自适应决策。
- 从孤立功能到集成系统的演进: 机器学习、深度神经网络的最新进展以及计算能力的提升,使人工智能得以从执行简单的独立任务过渡到在整体的、互连的系统中运作。这种演进使人工智能能够为更广泛的决策过程和适应性战略做出贡献,营造技术与人类监督协同运作的环境。
- 连接人工智能与人类智能: 尽管人工智能在自动化和数据处理方面取得了显著成就,但其真正潜力在于与人类智能的结合。人类在情境理解、创造力和伦理推理方面表现卓越——这些仍是人工智能存在局限的领域。通过将人工智能与人类监督相结合,组织可以实现增强的决策、创新和运营效率,确保技术服务于放大人类潜能,而非取代人类。
- 从静态系统到动态行动系统的转型: 传统的“记录系统”旨在维护数据完整性和历史记录。然而,随着商业环境日益复杂,对“行动系统”的需求不断增长,这些系统不仅管理数据,还主动驱动决策和流程。这些动态系统利用实时分析、预测建模和响应式自动化,使组织能够从反应式战略转向主动式战略。ODI通过提供一个框架封装了这一演进,在该框架中,分布式的人工智能组件作为一个统一系统协同工作,通过协调来增强运营敏捷性和战略洞察力。
现有的人工智能智能体模型
“智能智能体”的概念于1980年代末出现,成为人工智能领域的一个基础抽象概念,由伍尔德里奇和詹宁斯在1994年将其形式化为能够感知环境、进行推理并采取行动以实现特定目标的自主软件实体。早期的智能体架构大致分为三类:反应式(将感知直接映射为行动的基于行为的系统)、慎思式(计算明确行动序列的符号规划器),以及结合这两种方法的混合或分层模型。
在1990年代和2000年代,多智能体强化学习出现,以解决多个交互智能体之间的协调问题。斯通和维洛索在2000年对MARL技术进行了全面综述,重点介绍了独立Q学习、联合行动学习器和协同价值函数分解等经典算法。杨等人进一步综合了MARL的最新进展,强调了随着智能体数量增加带来的非平稳性、信用分配和可扩展性挑战。协作式MARL算法利用了共享奖励结构,但在大型异构系统中常面临部分可观测性和通信开销的问题。
除了MARL之外,符号认知架构和信念-愿望-意图框架在需要显式推理、解释和知识重用的任务中仍然具有影响力。然而,这些架构在与非结构化数据或遗留企业系统集成时,常常存在脆弱性和高昂工程成本的问题。更近期的深度MARL方法利用集中式评论器和基于图的通信来缓解协调复杂性,但由于训练不稳定和集成困难,在现实世界部署中仍面临局限。
