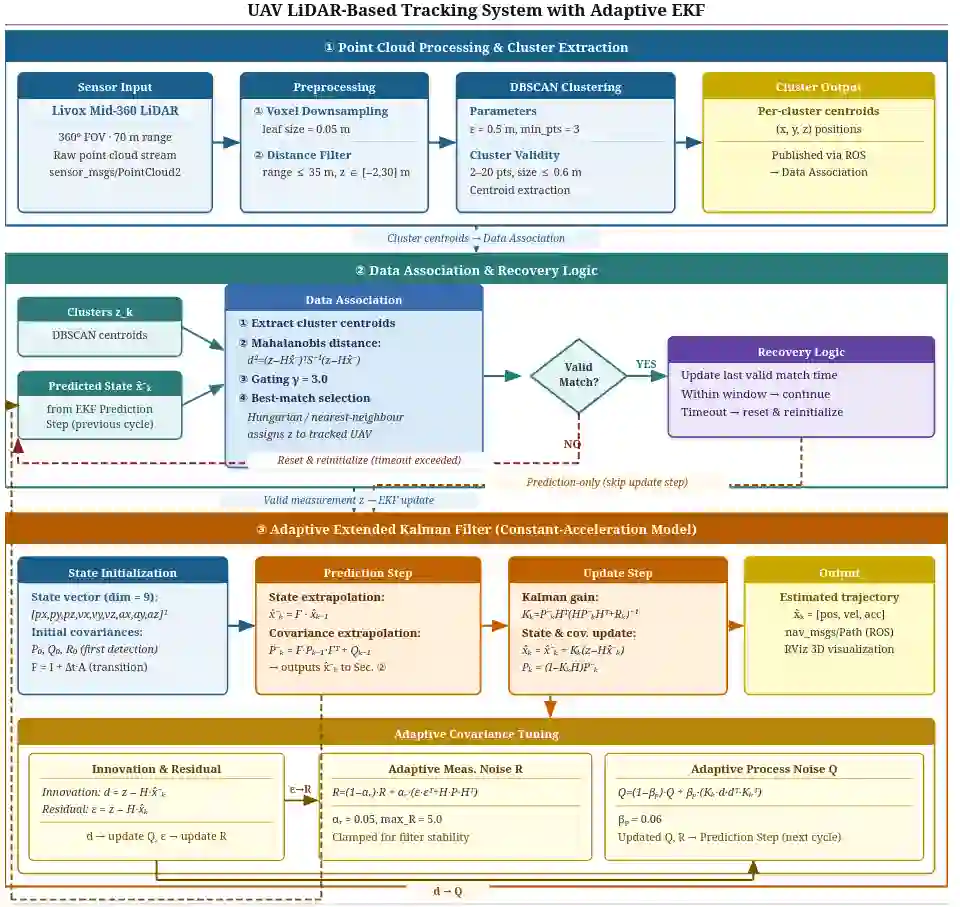
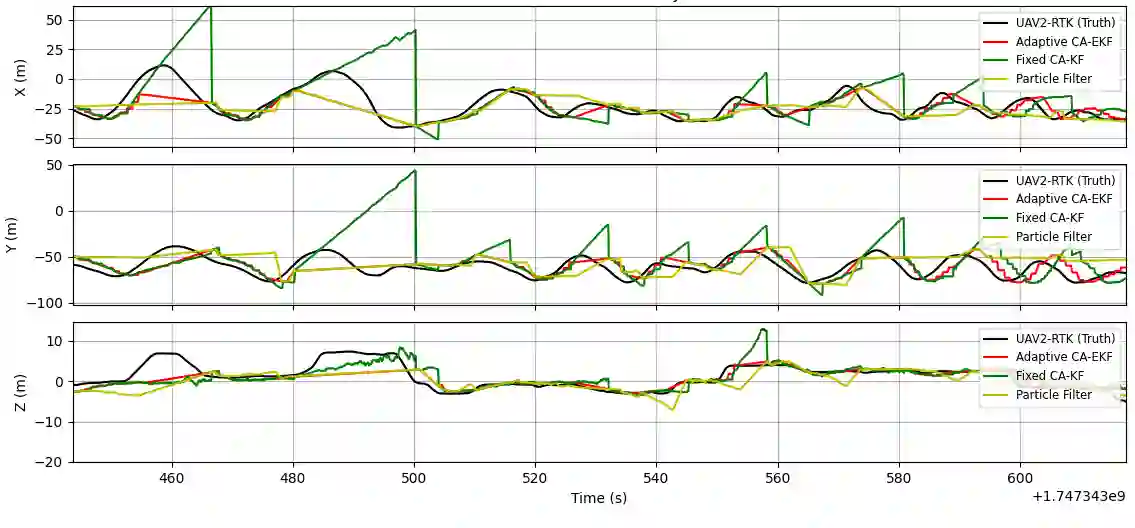
Accurate relative positioning is crucial for swarm aerial robotics, enabling coordinated flight and collision avoidance. Although vision-based tracking has been extensively studied, 3D LiDAR-based methods remain underutilized despite their robustness under varying lighting conditions. Existing systems often rely on bulky, power-intensive sensors, making them impractical for small UAVs with strict payload and energy constraints. This paper presents a lightweight LiDAR-based UAV tracking system incorporating an Adaptive Extended Kalman Filter (AEKF) framework. Our approach effectively addresses the challenges posed by sparse, noisy, and nonuniform point cloud data generated by non-repetitive scanning 3D LiDARs, ensuring reliable tracking while remaining suitable for small drones with strict payload constraints. Unlike conventional filtering techniques, the proposed method dynamically adjusts the noise covariance matrices using innovation and residual statistics, thereby enhancing tracking accuracy under real-world conditions. Additionally, a recovery mechanism ensures continuity of tracking during temporary detection failures caused by scattered LiDAR returns or occlusions. Experimental validation was performed using a Livox Mid-360 LiDAR mounted on a DJI F550 UAV in real-world flight scenarios. The proposed method demonstrated robust UAV tracking performance under sparse LiDAR returns and intermittent detections, consistently outperforming both standard Kalman filtering and particle filtering approaches during aggressive maneuvers. These results confirm that the framework enables reliable relative positioning in GPS-denied environments without the need for multi-sensor arrays or external infrastructure.
翻译:精确的相对定位对于集群空中机器人至关重要,能够实现协同飞行与避撞。尽管基于视觉的跟踪方法已得到广泛研究,但基于三维激光雷达的方法在多变光照条件下具有鲁棒性,却仍未得到充分利用。现有系统通常依赖笨重且高功耗的传感器,使其难以适用于有效载荷和能源严格受限的小型无人机。本文提出了一种结合自适应扩展卡尔曼滤波框架的轻量级激光雷达无人机跟踪系统。该方法有效应对了非重复扫描三维激光雷达产生的稀疏、含噪且非均匀点云数据带来的挑战,在确保可靠跟踪的同时,仍适用于有效载荷严格受限的小型无人机。与传统的滤波技术不同,所提方法利用新息与残差统计量动态调整噪声协方差矩阵,从而提升了实际条件下的跟踪精度。此外,系统还包含一种恢复机制,可在因激光雷达回波散射或遮挡导致临时检测失败时确保跟踪的连续性。实验验证使用搭载于DJI F550无人机上的Livox Mid-360激光雷达在真实飞行场景中进行。所提方法在激光雷达回波稀疏和间歇性检测条件下均表现出稳健的无人机跟踪性能,在剧烈机动过程中持续优于标准卡尔曼滤波与粒子滤波方法。这些结果证实,该框架能够在无GPS环境中实现可靠的相对定位,且无需多传感器阵列或外部基础设施。