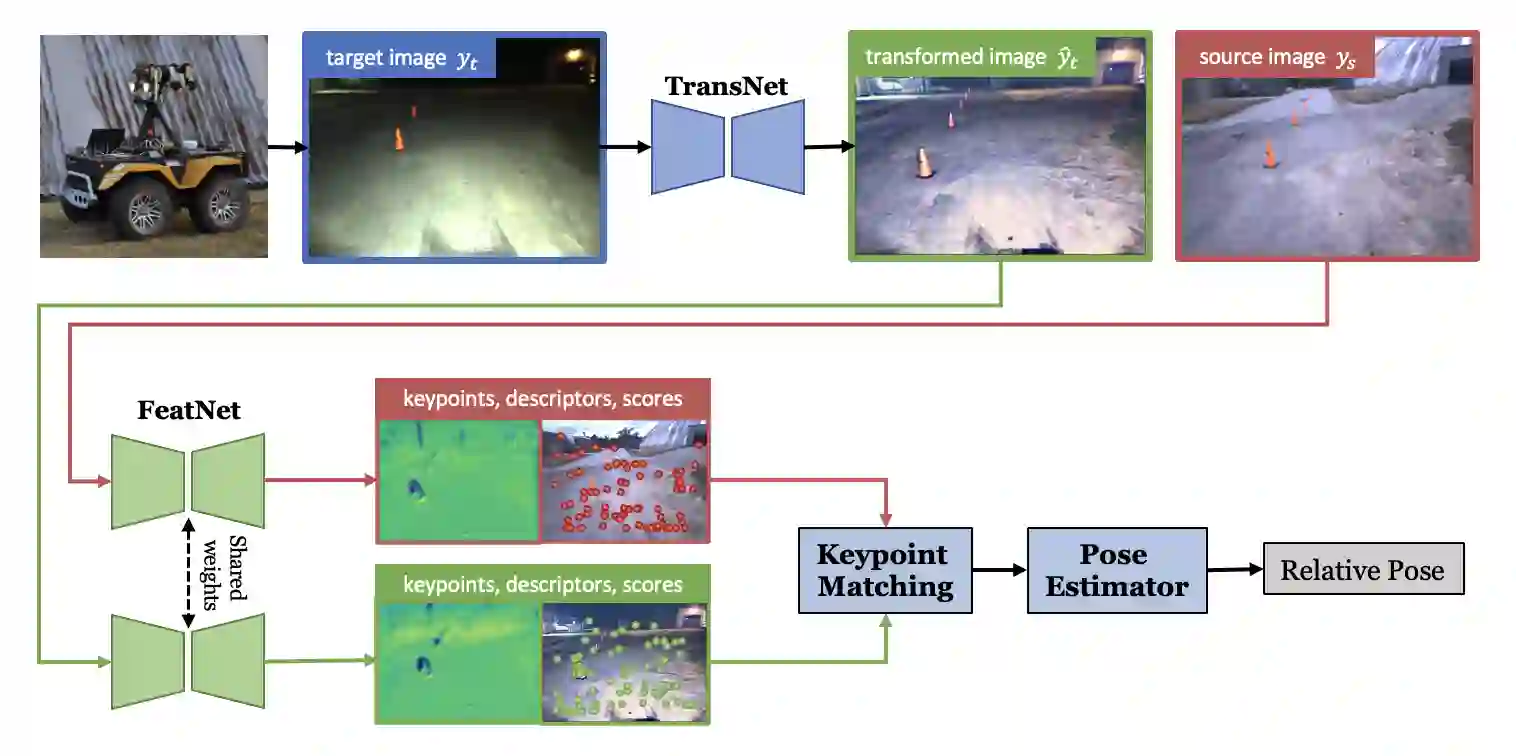
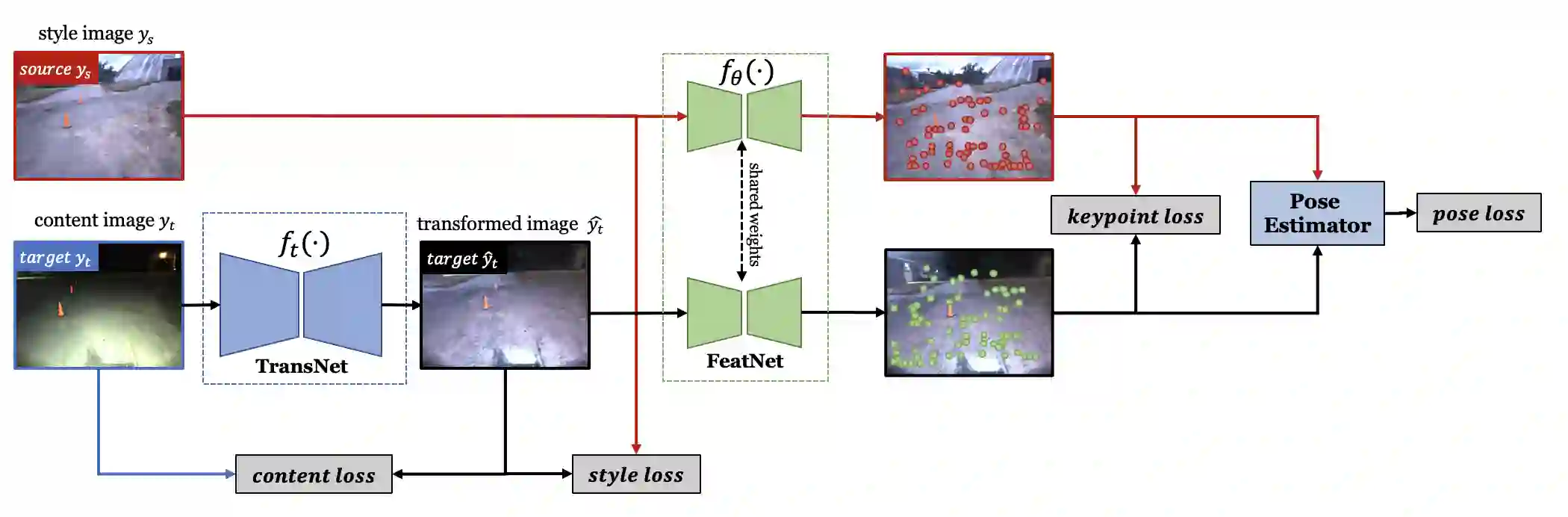
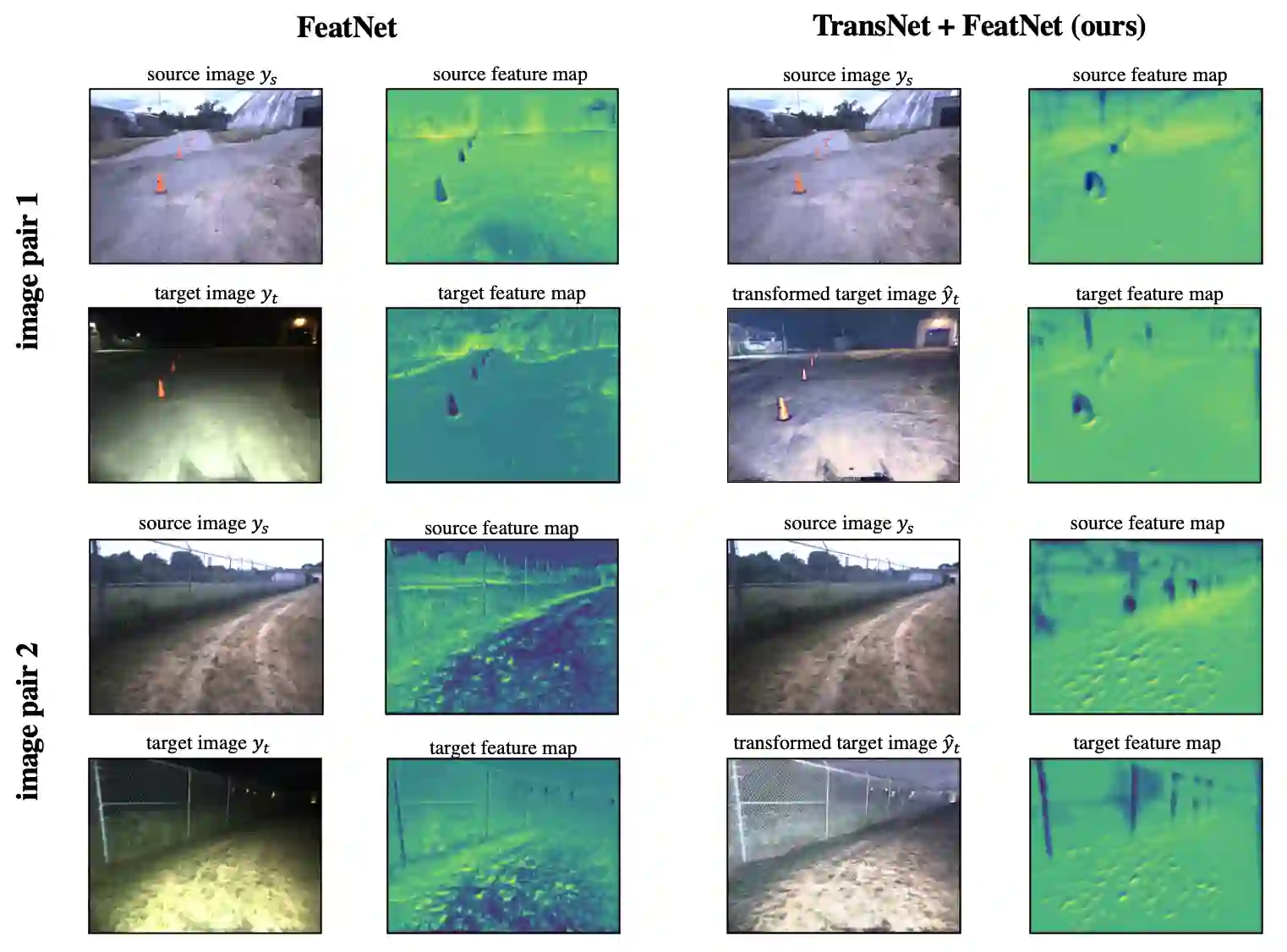
Long-term visual localization is an essential problem in robotics and computer vision, but remains challenging due to the environmental appearance changes caused by lighting and seasons. While many existing works have attempted to solve it by directly learning invariant sparse keypoints and descriptors to match scenes, these approaches still struggle with adverse appearance changes. Recent developments in image transformations such as neural style transfer have emerged as an alternative to address such appearance gaps. In this work, we propose to combine an image transformation network and a feature-learning network to improve long-term localization performance. Given night-to-day image pairs, the image transformation network transforms the night images into day-like conditions prior to feature matching; the feature network learns to detect keypoint locations with their associated descriptor values, which can be passed to a classical pose estimator to compute the relative poses. We conducted various experiments to examine the effectiveness of combining style transfer and feature learning and its training strategy, showing that such a combination greatly improves long-term localization performance.
翻译:长期视觉定位是机器人学和计算机视觉中的一个基本问题,但由于光照和季节变化导致的环境外观变化,该问题仍然具有挑战性。尽管现有许多工作试图通过直接学习不变性稀疏关键点和描述符来匹配场景,但这些方法仍难以应对剧烈的外观变化。近年来,图像变换(如神经风格迁移)的最新进展为解决此类外观差异提供了新途径。本文提出将图像变换网络与特征学习网络相结合,以提升长期定位性能。给定夜间到白天的图像对,图像变换网络在特征匹配前将夜间图像转换为类似白天的条件;特征网络学习检测关键点位置及其关联的描述符值,这些信息可传递给经典姿态估计器以计算相对位姿。我们开展了多项实验,验证风格迁移与特征学习及其训练策略结合的有效性,结果表明这种组合能显著提升长期定位性能。