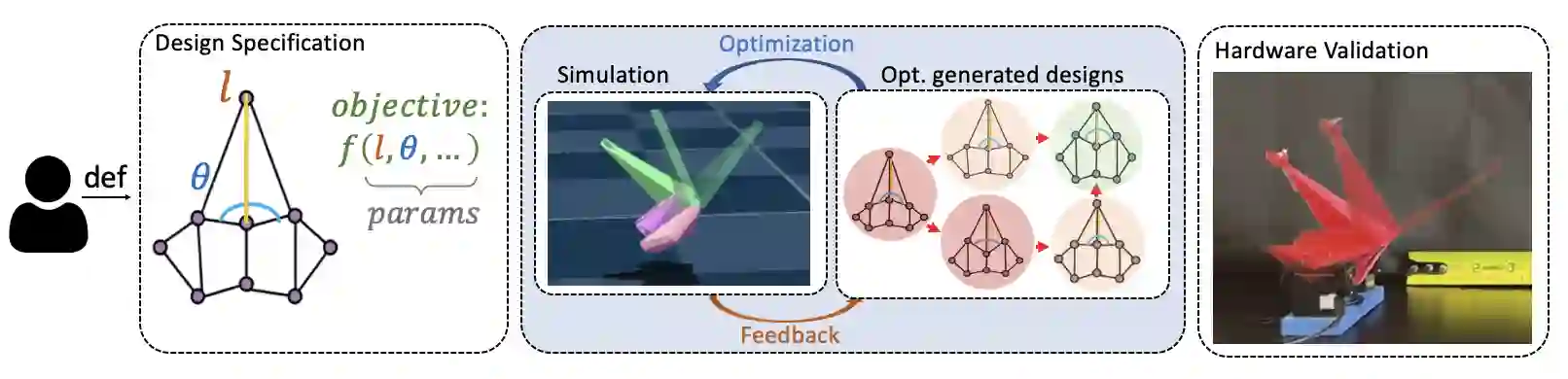
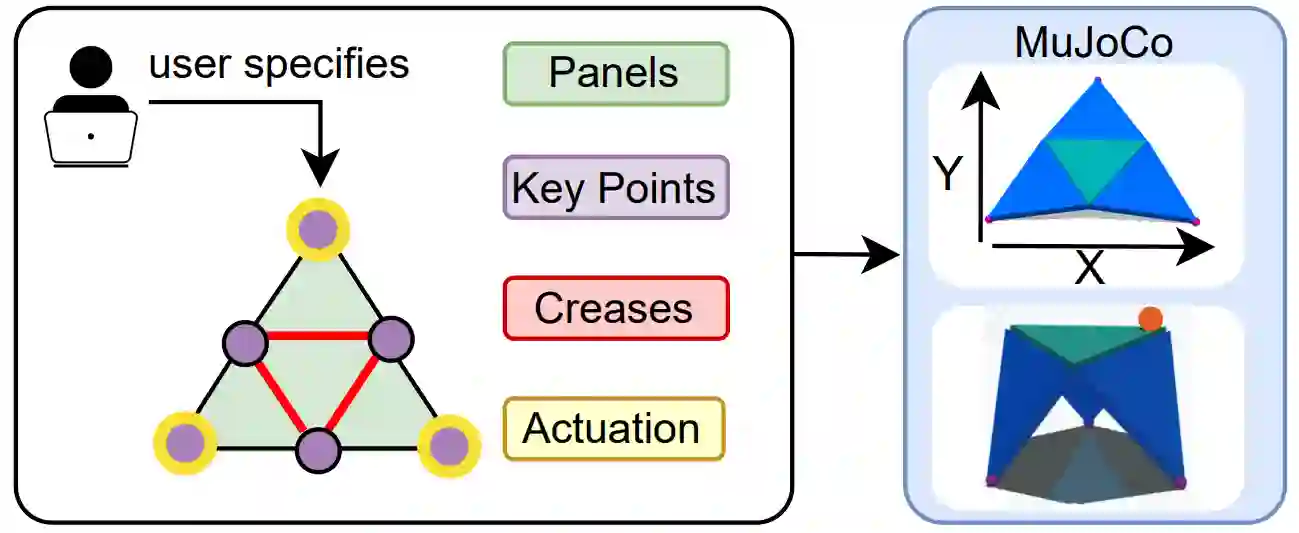
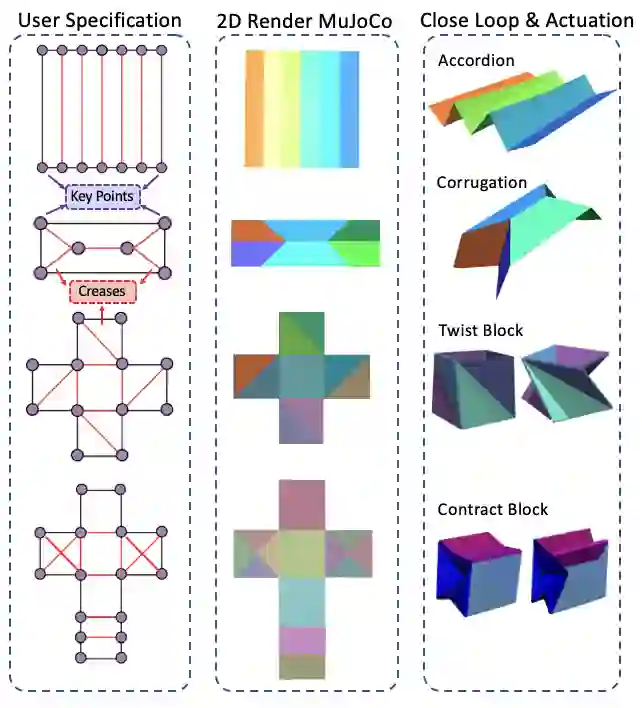
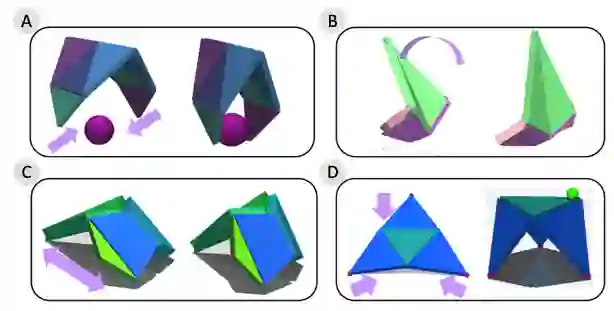
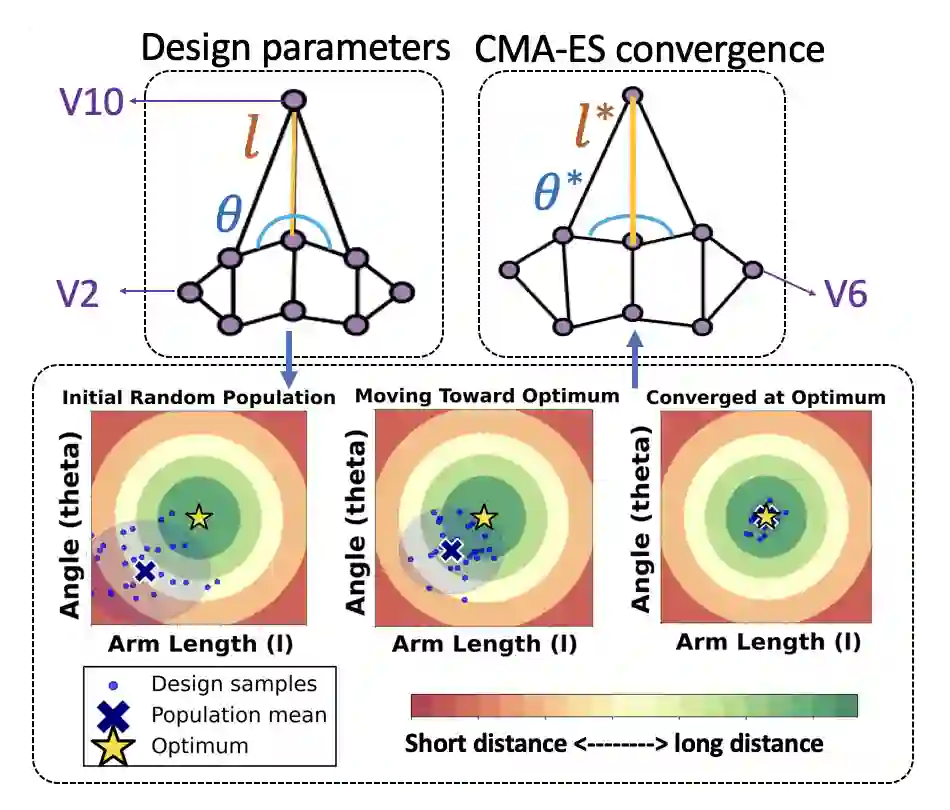
Origami-inspired mechanisms can transform flat sheets into functional three-dimensional dynamic structures that are lightweight, compact, and capable of complex motion. These properties make origami increasingly valuable in robotic and deployable systems. However, accurately simulating their folding behavior and interactions with the environment remains challenging. To address this, we present a design framework for origami mechanism simulation that utilizes MuJoCo's deformable-body capabilities. In our approach, origami sheets are represented as graphs of interconnected deformable elements with user-specified constraints such as creases and actuation, defined through an intuitive graphical user interface (GUI). This framework allows users to generate physically consistent simulations that capture both the geometric structure of origami mechanisms and their interactions with external objects and surfaces. We demonstrate our method's utility through a case study on an origami catapult, where design parameters are optimized in simulation using the Covariance Matrix Adaptation Evolution Strategy (CMA-ES) and validated experimentally on physical prototypes. The optimized structure achieves improved throwing performance, illustrating how our system enables rapid, simulation-driven origami design, optimization, and analysis.
翻译:受折纸启发的机构能将平面薄片转变为功能性三维动态结构,这些结构具有轻质、紧凑且能实现复杂运动的特点。这些特性使折纸在机器人和可展开系统中日益重要。然而,精确模拟其折叠行为及与环境的交互仍具挑战性。为此,我们提出了一种利用MuJoCo可变形体能力的折纸机构仿真设计框架。在我们的方法中,折纸薄片被表示为互连可变形单元的图,并通过直观的图形用户界面(GUI)定义用户指定的约束,如折痕和驱动。该框架允许用户生成物理一致的仿真,既能捕捉折纸机构的几何结构,也能模拟其与外部物体及表面的相互作用。我们通过一个折纸弹射器的案例研究展示了本方法的实用性,其中设计参数在仿真中使用协方差矩阵自适应进化策略(CMA-ES)进行优化,并在物理样机上进行了实验验证。优化后的结构实现了更优的投掷性能,这说明了我们的系统如何支持快速、基于仿真的折纸设计、优化与分析。