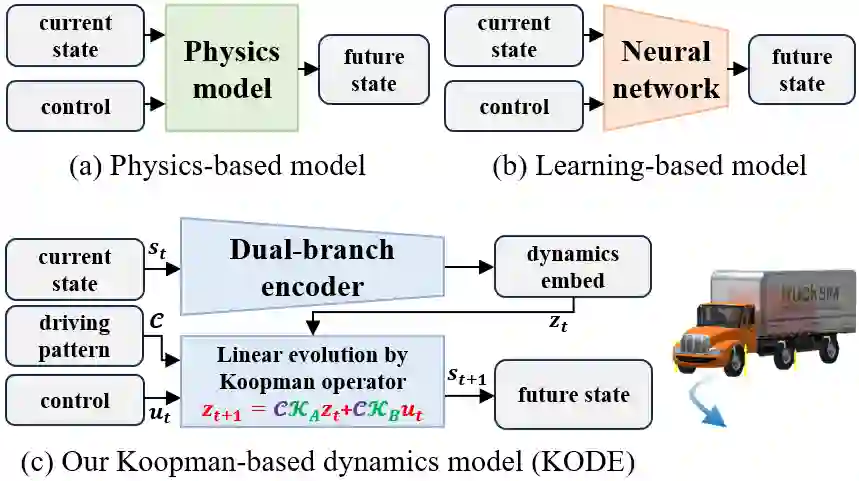
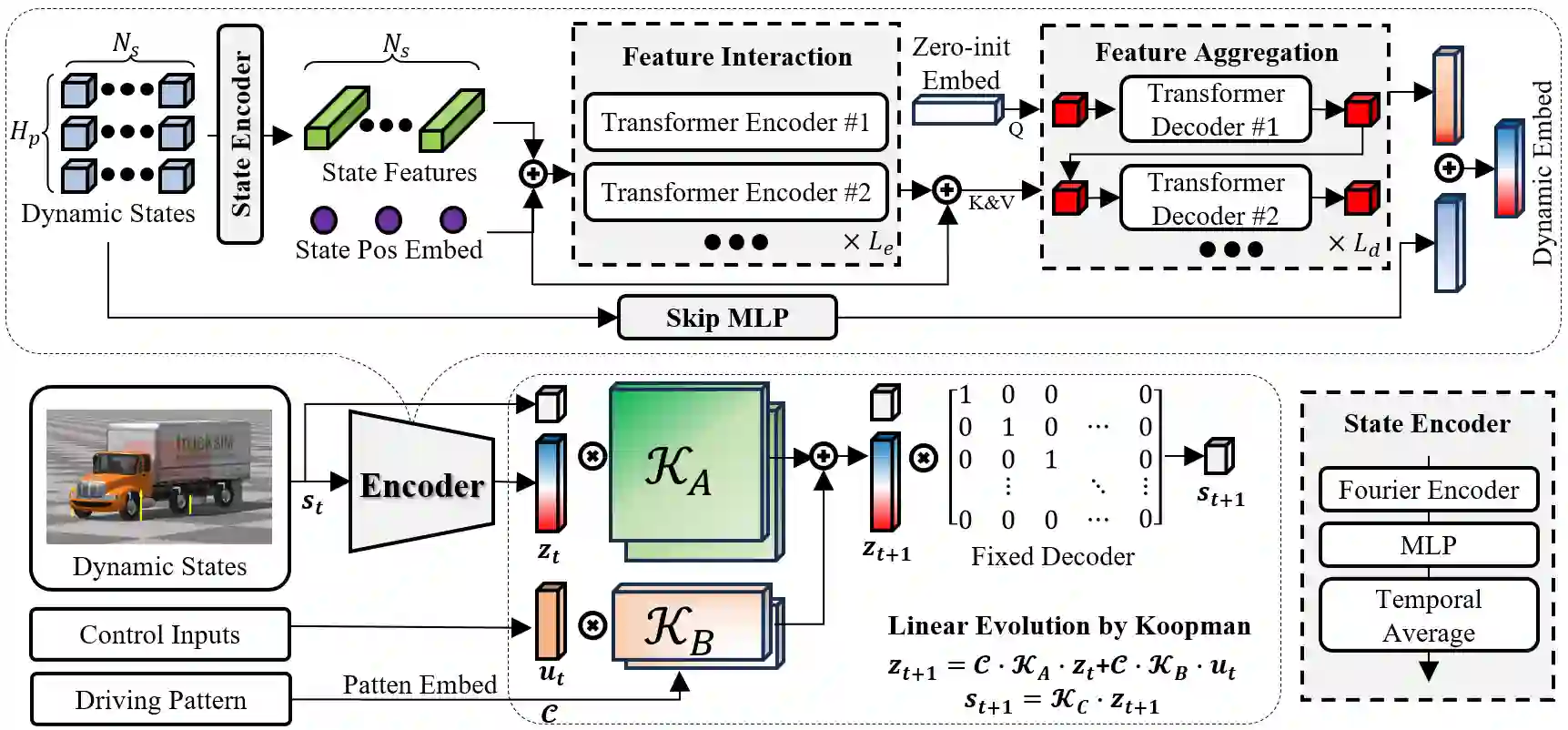
Advanced autonomous driving systems require accurate vehicle dynamics modeling. However, identifying a precise dynamics model remains challenging due to strong nonlinearities and the coupled longitudinal and lateral dynamic characteristics. Previous research has employed physics-based analytical models or neural networks to construct vehicle dynamics representations. Nevertheless, these approaches often struggle to simultaneously achieve satisfactory performance in terms of system identification efficiency, modeling accuracy, and compatibility with linear control strategies. In this paper, we propose a fully data-driven dynamics modeling method tailored for complex distributed electric-drive trucks (DETs), leveraging Koopman operator theory to represent highly nonlinear dynamics in a lifted linear embedding space. To achieve high-precision modeling, we first propose a novel dual-branch encoder which encodes dynamic states and provides a powerful basis for the proposed Koopman-based methods entitled KODE. A physics-informed supervision mechanism, grounded in the geometric consistency of temporal vehicle motion, is incorporated into the training process to facilitate effective learning of both the encoder and the Koopman operator. Furthermore, to accommodate the diverse driving patterns of DETs, we extend the vanilla Koopman operator to a mixture-of-Koopman operator framework, enhancing modeling capability. Simulations conducted in a high-fidelity TruckSim environment and real-world experiments demonstrate that the proposed approach achieves state-of-the-art performance in long-term dynamics state estimation.
翻译:先进的自动驾驶系统需要精确的车辆动力学建模。然而,由于强烈的非线性以及纵向与横向动力学特性的耦合,识别精确的动力学模型仍然具有挑战性。先前的研究采用基于物理的分析模型或神经网络来构建车辆动力学表征。然而,这些方法往往难以在系统辨识效率、建模精度以及与线性控制策略的兼容性方面同时取得令人满意的性能。本文针对复杂的分布式电驱卡车,提出了一种完全数据驱动的动力学建模方法,该方法利用库普曼算子理论在提升的线性嵌入空间中表示高度非线性的动力学。为实现高精度建模,我们首先提出了一种新颖的双分支编码器,用于编码动力学状态,并为所提出的基于库普曼的方法(命名为KODE)提供强大的基函数。一种基于时序车辆运动几何一致性的物理信息监督机制被纳入训练过程,以促进编码器和库普曼算子的有效学习。此外,为适应分布式电驱卡车的多样化驾驶模式,我们将基础的库普曼算子扩展为混合库普曼算子框架,从而增强了建模能力。在高保真TruckSim环境中进行的仿真以及真实世界实验表明,所提出的方法在长期动力学状态估计方面达到了最先进的性能。