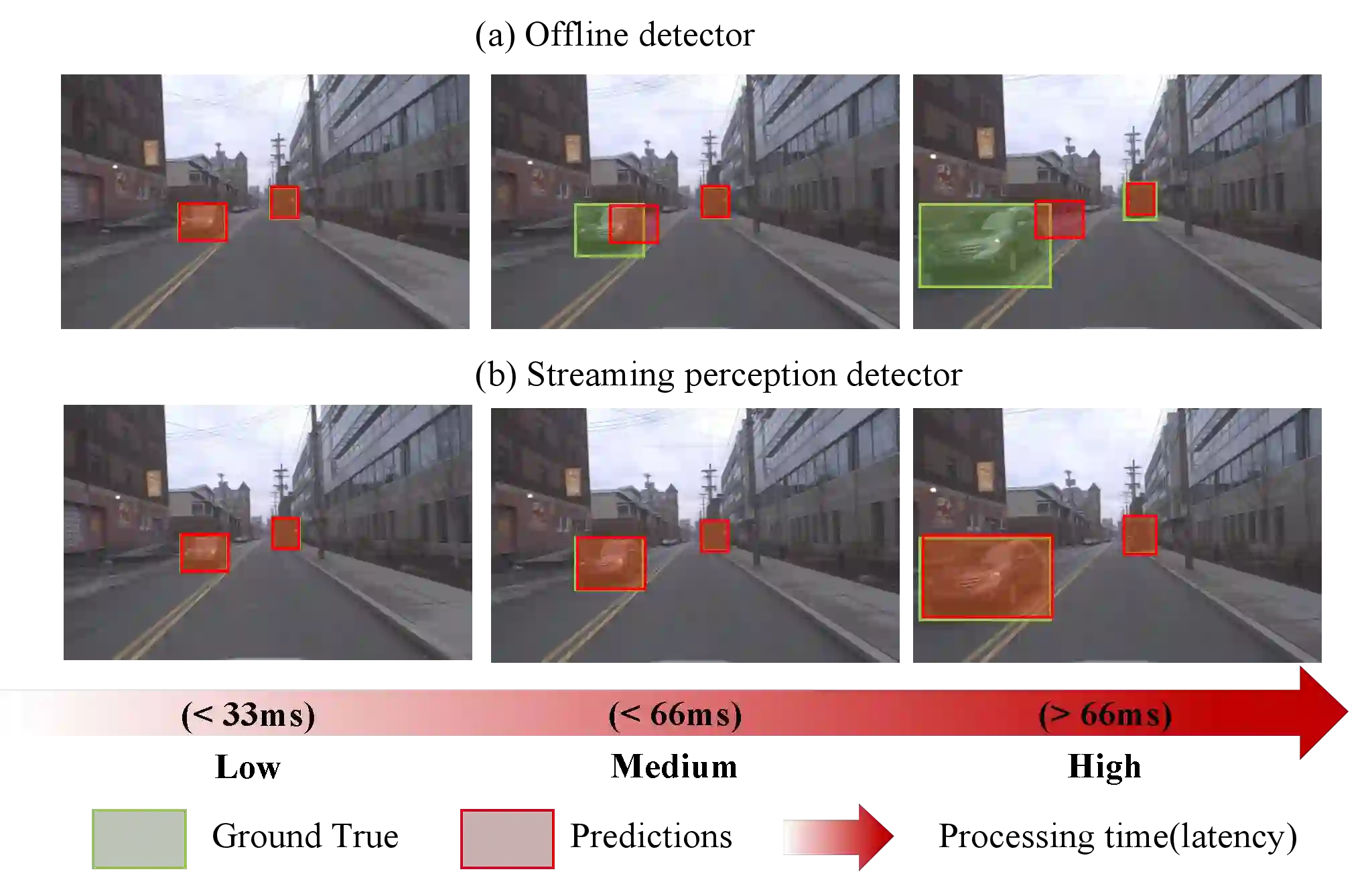
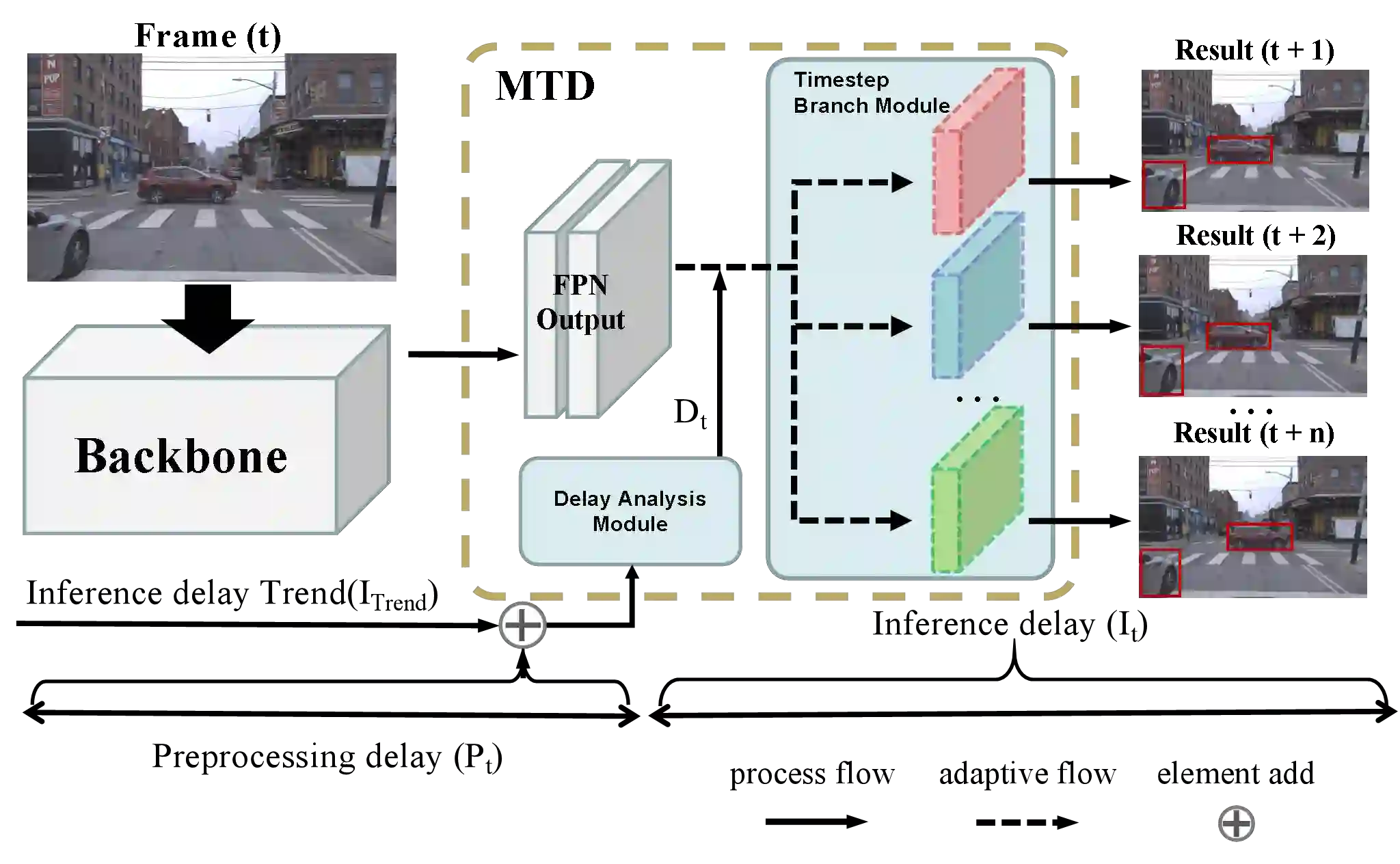
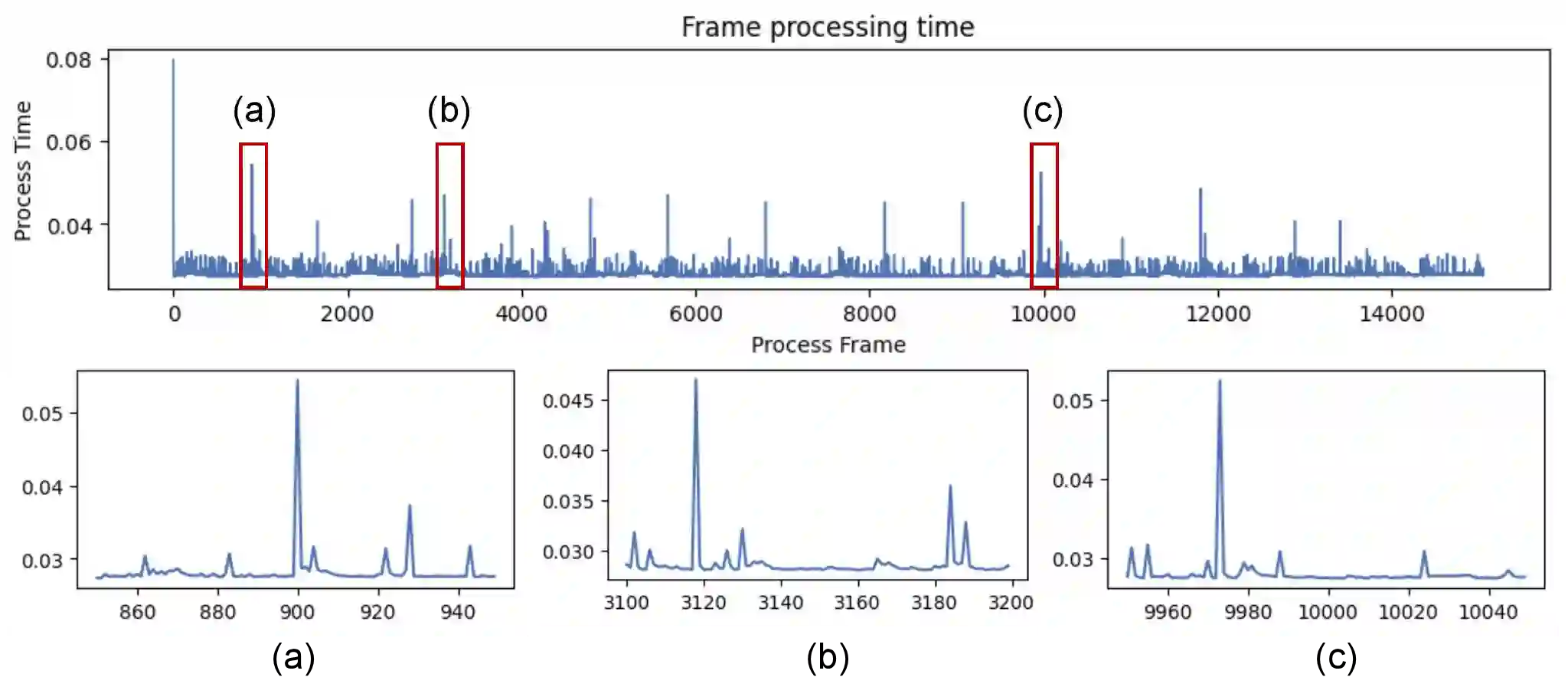
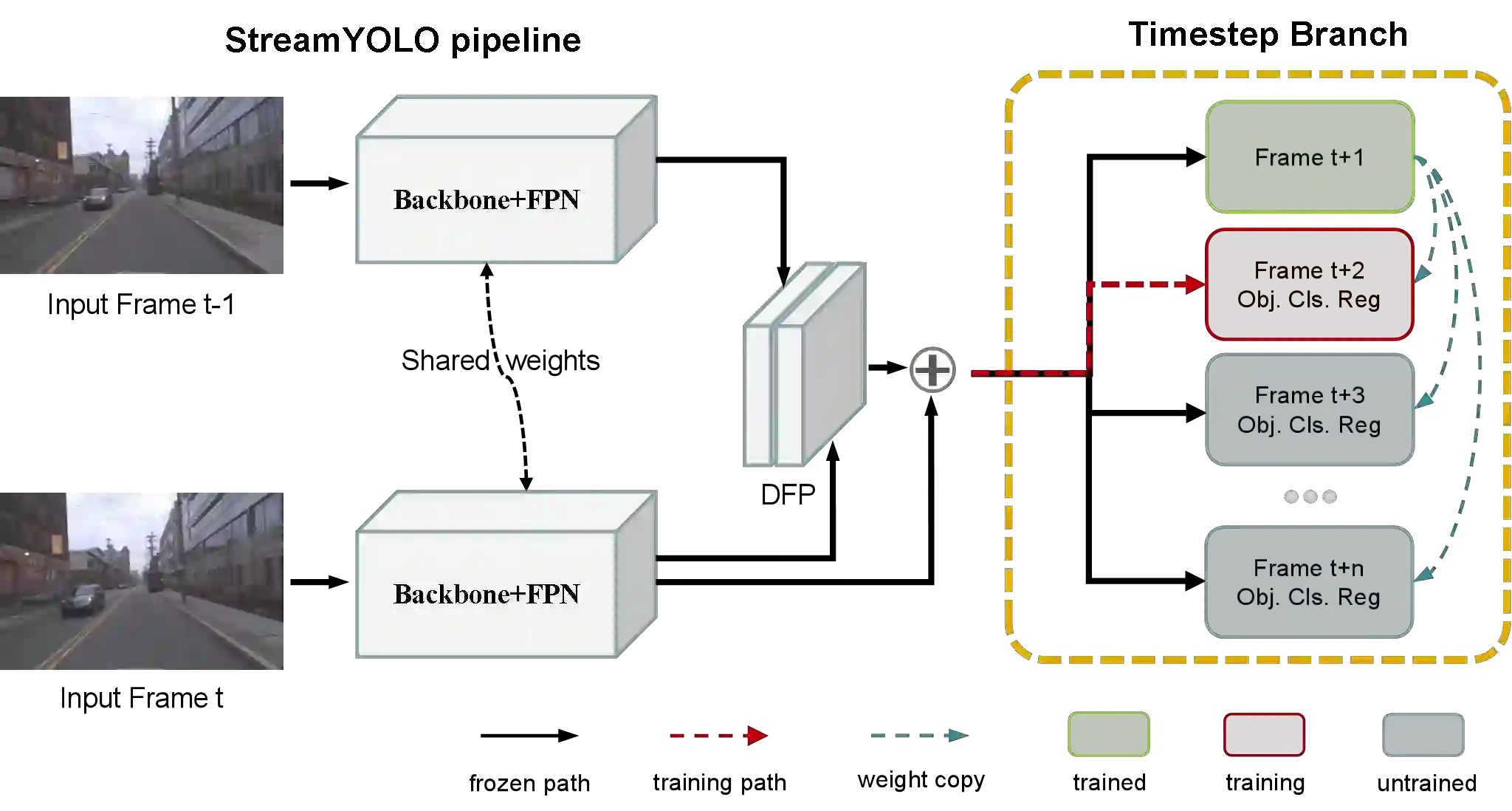
Autonomous driving systems require real-time environmental perception to ensure user safety and experience. Streaming perception is a task of reporting the current state of the world, which is used to evaluate the delay and accuracy of autonomous driving systems. In real-world applications, factors such as hardware limitations and high temperatures inevitably cause delays in autonomous driving systems, resulting in the offset between the model output and the world state. In order to solve this problem, this paper propose the Multi- Timestep Detector (MTD), an end-to-end detector which uses dynamic routing for multi-branch future prediction, giving model the ability to resist delay fluctuations. A Delay Analysis Module (DAM) is proposed to optimize the existing delay sensing method, continuously monitoring the model inference stack and calculating the delay trend. Moreover, a novel Timestep Branch Module (TBM) is constructed, which includes static flow and adaptive flow to adaptively predict specific timesteps according to the delay trend. The proposed method has been evaluated on the Argoverse-HD dataset, and the experimental results show that it has achieved state-of-the-art performance across various delay settings.
翻译:自动驾驶系统需要实时环境感知以确保用户安全与体验。流式感知是一项报告当前世界状态的任务,用于评估自动驾驶系统的延迟与精度。在实际应用中,硬件限制、高温等因素不可避免地导致自动驾驶系统产生延迟,进而造成模型输出与世界状态之间的偏移。为解决该问题,本文提出多时间步检测器(MTD),一种采用动态路由实现多分支未来预测的端到端检测器,赋予模型抵抗延迟波动能力。设计了延迟分析模块(DAM)以优化现有延迟感知方法,持续监测模型推理栈并计算延迟趋势。此外,构建了新型时间步分支模块(TBM),包含静态流与自适应流,可根据延迟趋势自适应预测特定时间步。所提方法已在Argoverse-HD数据集上完成评估,实验结果表明,该方法在多种延迟设置下均取得了最优性能。