
本文是一篇发表于期刊Journal of Engineering and Applied Science的综合性综述,旨在全面探讨无人机蜂群(UAV swarms)这一领域。文章指出,无人机集群代表了空中机器人技术的变革性进步,其通过利用协同自主性来增强操作能力。与单一机器人系统相比,受自然界社会行为启发的集群系统在多任务处理、可扩展性、成本效益、鲁棒性和适应性方面具有显著优势。以下内容是对本综述论文的解读。
一、 概述:无人机集群——空中机器人的变革性进展
集群机器人系统是多机器人系统(MRS)中的一种协调方法,由一组具有相似能力的、相对简单的自主机器人组成。它们通过局部传感和通信能力进行交互,从而在完成预定任务时比单个机器人更高效。无人机集群的核心是MRS的协调,即自主空中智能体在路径规划、任务分配和编队控制方面进行集体操作。
当前,人工智能(AI)和机器学习(ML)的集成对于提升无人机集群的决策和适应能力至关重要。本文的贡献在于全面审视了无人机集群的基础设施、最新研究进展、多样化应用,并指明了技术挑战与未来方向。
二、 无人机集群的基础设施与核心特征
无人机集群的有效运行依赖于一系列紧密协作的基础设施组件,并展现出使其区别于传统系统的关键特征。
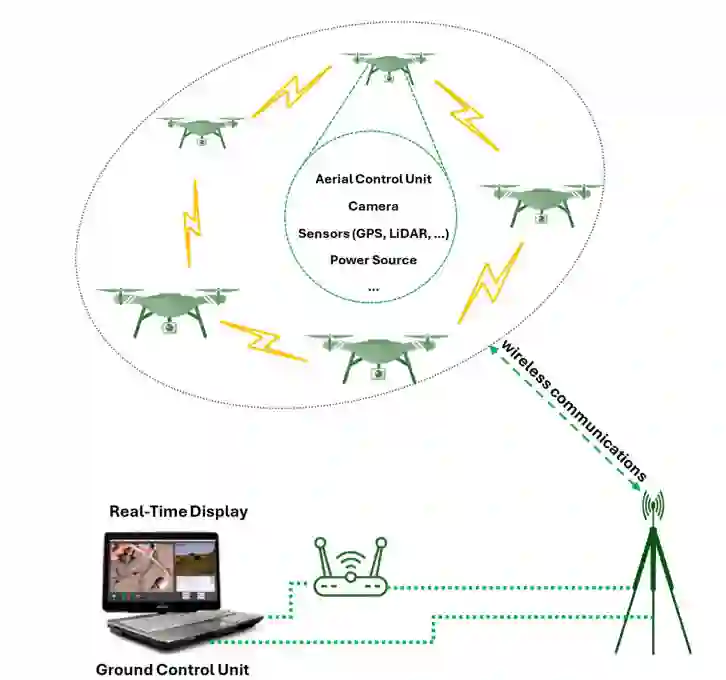
1. 基础设施组件 无人机集群的基础设施由七大关键部件构成,确保集群的整体运作与协调:
- 无人机/四旋翼飞行器:作为集群中的个体单元,配备传感器、处理器及用于通信和协调的硬件。
- 控制单元:负责管理整个集群,确保无人机在期望参数内运行。可以是地面站或基于云的系统,提供控制、监控和数据接收的中心接口。
- 通信系统:用于无人机之间以及与地面控制站实时交换信息的无线网络,常采用Wi-Fi、蓝牙或Zigbee等协议。
- 传感器:集成传感器(如摄像头、激光雷达、GPS、加速度计、陀螺仪)用于收集和处理环境数据。
- 算法:特别是群体智能(SI)算法,用于实现自主协同,包括路径规划、碰撞避免、编队控制和决策。
- 能源:电池或系留供电,直接影响飞行时间和整体性能。
- 导航系统:如GPS、惯性导航和视觉里程计,使无人机能够自主导航和避撞。
2. 关键特征与优势 无人机集群作为MRS的一个子集,具备以下显著特征,这些特征共同支撑了其广泛应用:
- 成本效益:使用一组专用机器人比构建一个单一的多功能机器人更具成本效益,且不受尺寸和有效负载限制。
- 可扩展性:即使机器人数量增加,也能保持其有效性和性能。
- 鲁棒性与生存性:在不利条件下保持功能,并能在机器人发生故障时重新配置以减轻影响。
- 适应性与灵活性:调整集体行为以响应环境变化或新的任务目标。
- 并行性:多个机器人并发且独立地执行任务,提升系统性能和效率。
- 冗余性与容错性:通过重新配置剩余机器人来补偿故障,克服单点故障问题。
- 多任务处理:将任务分解为可同时完成的子任务,从而加快任务完成速度。
- 可分布性:基于单个机器人的能力来协调和分配任务,提高了效率、可扩展性和对条件变化的适应性。
三、 无人机集群的关键研究领域
无人机集群的研究是跨学科的,涉及多个核心优化与协调问题,主要包括以下六大方向:
- 任务分配:将任务分配给一组机器人,以在考虑每个机器人的能力和限制的同时,最大化整体性能。这本质上是一个组合优化问题。
- 路径规划:为多个机器人在复杂环境中导航寻找最有效的路线,同时避免障碍物和碰撞。协调多机器人路径规划是核心挑战之一。
- 资源分配:在多个机器人之间分配能源、时间和通信带宽等关键资源,以优化集群整体性能。
- 编队控制:协调多个机器人的运动以保持特定队形(如集群或队列),这对于需要同步移动的任务至关重要。
- 网络优化:优化多个机器人之间的通信和数据交换,以最小化延迟并最大化效率。
- 传感器布置:确定多个机器人上传感器的最佳位置,以最大化传感任务的覆盖范围和准确性。
其中,协同路径规划、任务分配与编队控制是研究重点:
-
协同路径规划:主要解决在共享环境中为机器人团队规划无碰撞路径的挑战。方法可分为两类:
- 集中式(耦合)规划:将多个机器人视为一个单一的高维机器人进行规划。该方法能提供完备的解,但所需样本数随机器人数量线性增长,可扩展性差。
- 解耦规划:为每个机器人单独规划路径,然后协调组合。该方法搜索维度低,可扩展性好,但本质上是不完备的,可能需要额外协调来保证找到解(如果存在的话)。
-
任务分配与角色互换:高效的多机器人任务规划与协调对系统至关重要。拍卖算法(机器人根据其独特能力和相关成本对任务出价)被广泛应用。任务互换性则指根据机器人个体能力和对特定任务的适应性来分配任务。当任务与执行机器人无关时(即任何机器人都能完成任何任务),机器人团队被认为是完全可互换的,这为算法设计提供了灵活性。
-
编队控制:涉及协调多个飞行机器人以保持特定队形来实现共同目标。主要策略包括:
- 基于虚拟结构:使用一个虚拟结构来引导无人机编队,适用于监视和测绘等需要保持刚性队形的应用。
- 领航-跟随:一个或多个无人机作为领航者,其余作为跟随者,适用于搜索救援等需要遵循特定路径的场景。
- 基于行为:每个无人机遵循简单的行为规则以形成期望队形,适用于动态环境和侦察、数据收集等任务。
四、 使能技术与集成
1. 通信与组网 有效通信是无人机集群成功运行的关键。集群需要低延迟通信以执行同步动作并快速响应环境变化。移动自组织网络(MANETs) 常用于促进无人机之间的直接通信,而无需依赖固定基础设施。然而,保持网络稳定性和避免拥塞是重大挑战。未来,5G/6G技术、区块链去中心化网络以及AI/ML优化的通信协议是重要发展方向。
2. 安全与隐私考量 在监视、军事等敏感应用中,安全与隐私至关重要。
- 安全挑战:主要包括保护通信链路免受干扰、欺骗和窃听等网络攻击。需要开发强大的加密技术和安全通信协议。
- 隐私挑战:在使用无人机集群进行监视和数据收集时,必须确保数据被负责任地使用,并保护个人和敏感位置的隐私。这需要严格的数据治理政策和隐私保护技术。
3. 人工智能与机器学习的集成 AI和ML的集成极大地推动了无人机集群向智能化发展。
- 群体智能(SI):作为AI的一个分支,SI研究受自然界启发的去中心化、自组织系统的集体行为。SI算法使无人机能够以分布式决策的方式进行协同导航、控制、感知和决策。
- 近期进展:在集群导航与控制、集群感知与决策算法方面取得了显著进步。例如,集群能进行集体感知以快速适应环境变化,并能通过集体决策优化任务分配。
- 应用赋能:AI/ML使无人机集群在搜索救援、环境监测、精准农业等任务中实现了自主决策、改进的目标识别、障碍物检测和优化的飞行路径。微分几何原理的应用也显著提高了无人机集群的制导、导航和控制性能。
五、 无人机集群的应用领域
无人机集群凭借其飞行优势和分布式行为,在民用和军事领域都有广泛应用。
1. 民用应用
- 自主监控:
- 精准农业:协同进行作物授粉、监测作物和土壤健康、收集大面积产量数据。
- 环境监测:高效覆盖大区域,进行污染检测、天气模式跟踪、空气质量监测和森林火灾探测。
- 野生动物保护:监测动物种群,追踪偷猎活动。
- 基础设施检查:快速准确地检查桥梁、管道和电力线路。
- 物流配送:
- 包裹投递:快速高效投递包裹,降低时间和成本。
- 医疗物资运输:向偏远或灾区投送必需物资。
- 应急响应:向危险或难以抵达地点的救援队运送设备和物资。
- 搜索与救援:在灾后场景中协助救援人员快速到达危险或难以进入的区域,提供实时空中图像和数据,提高救援效率。
- 娱乐与活动:
- 无人机灯光秀:多架无人机协同飞行,创造视觉奇观。
- 广告:在空中显示标识和信息,创造独特的促销效果。
2. 军事应用
- 监视与侦察:执行边境巡逻,监控大片区域,提供潜在威胁的实时情报;进行侦察行动,收集敌方位置和动向的关键数据。
- 作战支持:协助进行目标识别与跟踪,为地面部队提供准确及时的信息;用于电子战,干扰敌方通信,破坏其行动。
- 军事物流:为前线部队运输补给和装备,确保资源持续供应,适用于具有挑战性的环境。
六、 挑战、局限性与未来方向
尽管前景广阔,但无人机集群的实现仍面临一系列挑战,可分为传统挑战和高级挑战。
1. 主要挑战与局限性
- 通信与协调:确保集群智能体间的有效通信是一大挑战,因为随着智能体数量增加,所需通信量呈指数级增长。可靠通信在设备故障等意外情况下至关重要。
- 控制与算法:需要开发能够处理大型集群复杂性的鲁棒、可扩展且能量高效的控制算法。这包括任务分配、路径规划、运动协调和动态可行轨迹生成等基本集群行为。
- 同步与环境干扰:在环境干扰下实现无人机间的协调、同步并保持集群完整性是另一个主要挑战。
- 安全与隐私:在确保有效通信和协调的同时,维护集群安全(防御网络攻击)和数据隐私是持续的关注点。
- 可扩展性与鲁棒性:需要开发稳定、计算高效的算法,以处理动态和不可预测的环境。
- 异构集群与伦理:使用具有不同能力和传感器的异构机器人集群虽然能实现专业化任务分配,但也增加了复杂性。此外,在监视等应用中的伦理影响必须仔细考量。
2. 未来研究方向 为应对上述挑战,未来的研究将聚焦于以下方向:
- 算法与智能化:
- 专注于创建能量高效的算法,以延长无人机集群的 operational endurance。
- 利用AI/ML技术(包括深度学习和群体智能)来提升集群决策、自主控制、任务分配和适应性。
- 开发更鲁棒和可扩展的算法,以处理动态环境和大型集群。
- 通信与网络:
- 集成5G、6G及更高代际通信技术,以获得高数据速率、低延迟和高可靠性。
- 探索去中心化通信策略,如基于区块链的网络,以增强安全性并减少单点故障风险。
- 利用AI/ML优化通信协议,并根据实时数据自适应管理网络资源。
- 系统集成与高级能力:
- 集成新兴技术:如区块链和物联网(IoT),以实现安全的集群通信与协调。
- 探索异构集群:充分发挥具有不同能力机器人的潜力,进行专业化高效的任务分配。
- 增强自主性:研究协同任务分配和协调运动,以实现对复杂环境的完全自主控制。结合制导优化和目标跟踪技术以增强集群能力。
- 安全、伦理与跨学科合作:
- 开发高级威胁检测与缓解策略,探索量子密码学等安全通信方法。
- 仔细审视伦理影响,确保无人机集群的负责任和合乎道德的使用。
- 促进网络安全专家、无人机开发人员和政策制定者之间的跨学科合作,创建解决技术和伦理问题的综合框架。
七、 结论
无人机集群领域,特别是飞行机器人方面,已取得显著进展。通过利用多个机器人协同工作,无人机集群为处理复杂任务提供了一种独特而高效的方法。AI和ML技术的集成是推动其向智能化、自主化发展的关键动力。
尽管在通信、控制、可扩展性、安全性和能源效率等方面仍存在挑战,但通过去中心化算法、先进的AI/ML技术以及跨学科创新,正在有效地解决这些问题。未来的研究将继续专注于开发鲁棒的控制算法、自适应编队变更、能量效率提升以及安全的通信协议。
通过持续的研究与创新,无人机集群有望在农业、搜索救援、环境监测、基础设施检查以及军事行动等多个领域引发变革性进步,同时必须确保其发展与应用始终受到伦理规范的指导。
Alqudsi, Y., Makaraci, M. UAV swarms: research, challenges, and future directions. J. Eng. Appl. Sci. 72, 12 (2025). https://doi.org/10.1186/s44147-025-00582-3
