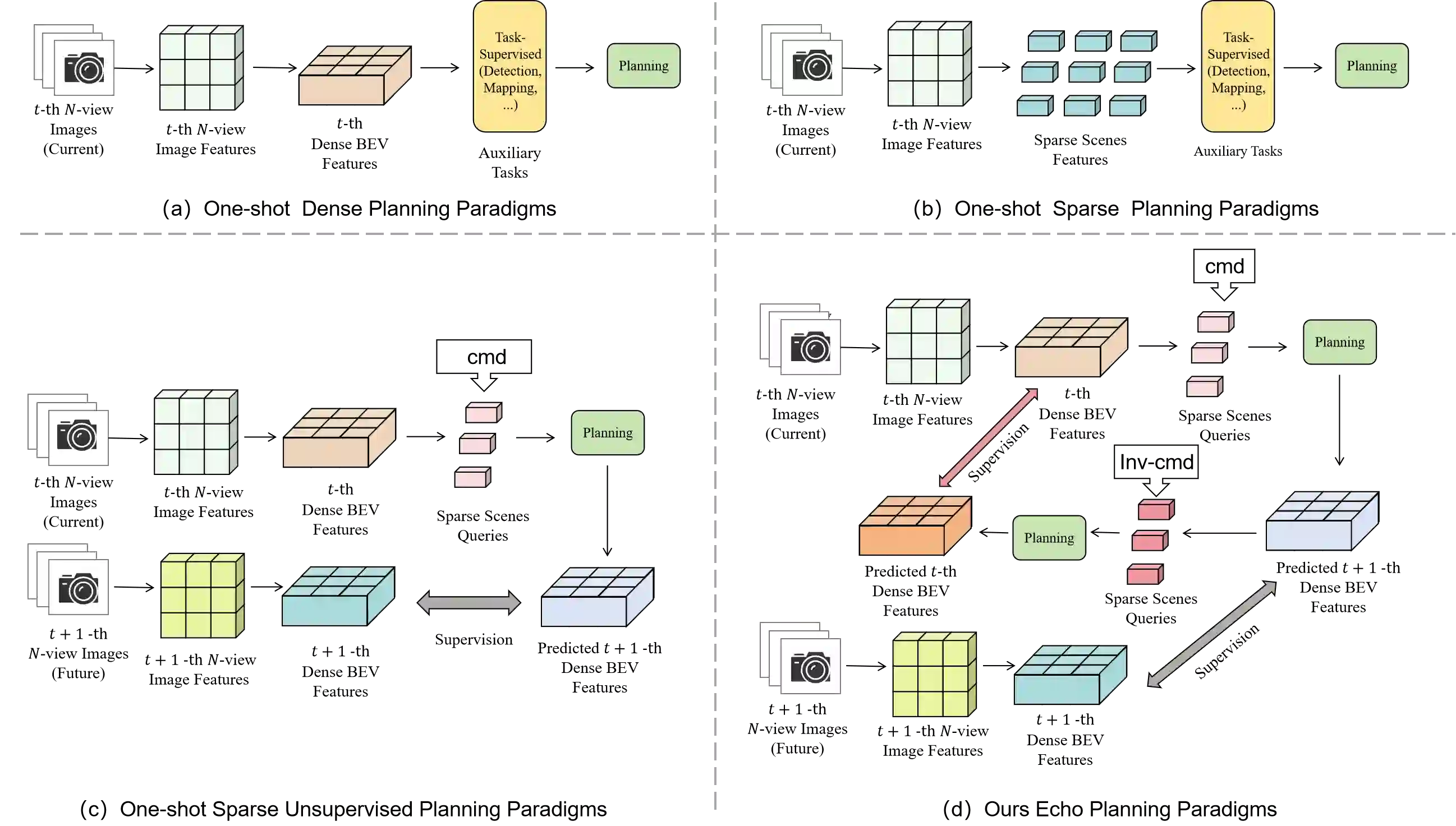
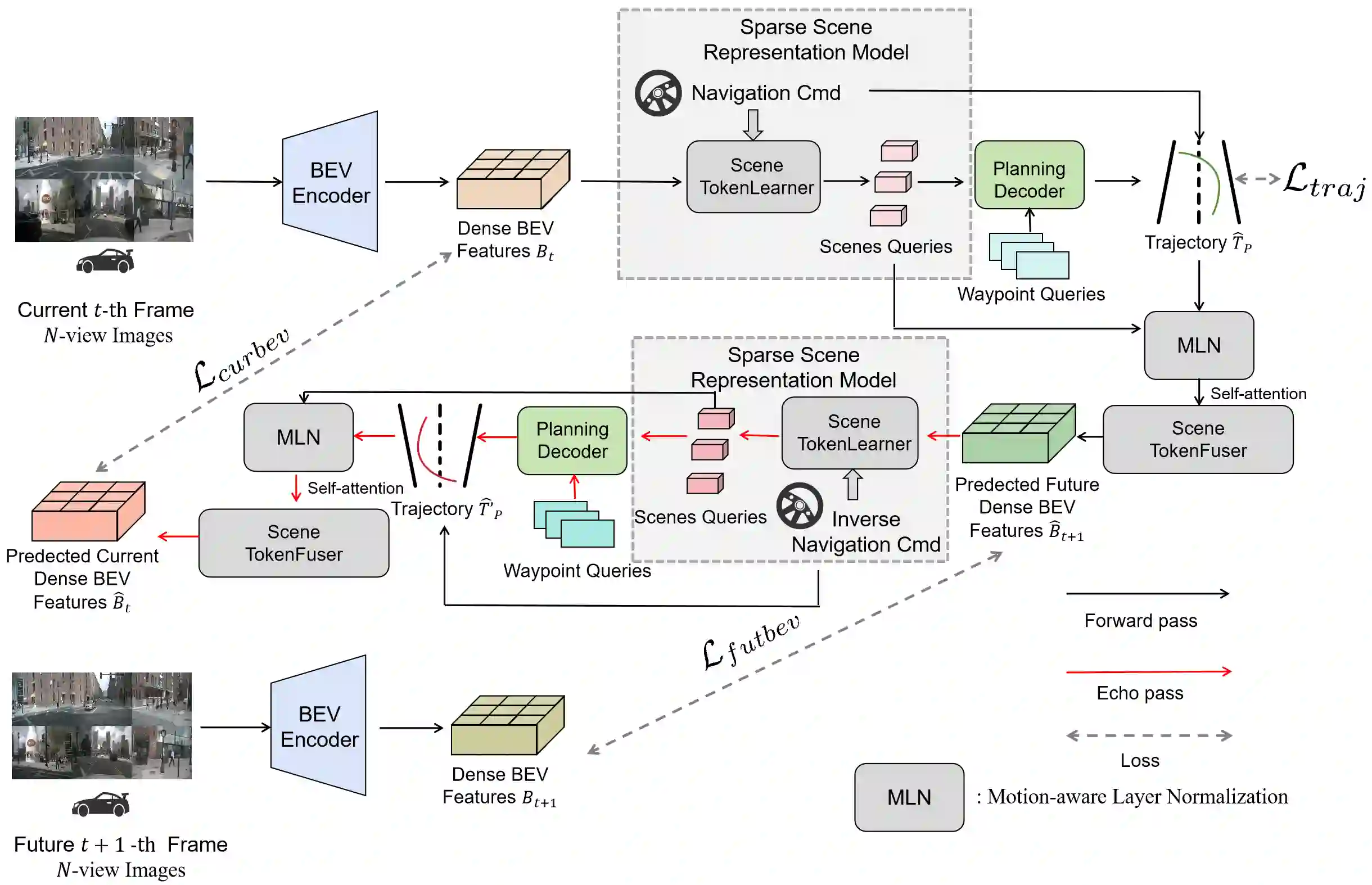
Modern end-to-end autonomous driving systems suffer from a critical limitation: their planners lack mechanisms to enforce temporal consistency between predicted trajectories and evolving scene dynamics. This absence of self-supervision allows early prediction errors to compound catastrophically over time. We introduce Echo Planning (EchoP), a new self-correcting framework that establishes an end-to-end Current - Future - Current (CFC) cycle to harmonize trajectory prediction with scene coherence. Our key insight is that plausible future trajectories should be bi-directionally consistent, i.e., not only generated from current observations but also capable of reconstructing them. The CFC mechanism first predicts future trajectories from the Bird's-Eye-View (BEV) scene representation, then inversely maps these trajectories back to estimate the current BEV state. By enforcing consistency between the original and reconstructed BEV representations through a cycle loss, the framework intrinsically penalizes physically implausible or misaligned trajectories. Experiments on nuScenes show that the proposed method yields competitive performance, reducing L2 error (Avg) by -0.04 m and collision rate by -0.12% compared to one-shot planners. Moreover, EchoP seamlessly extends to closed-loop evaluation, i.e., Bench2Drive, attaining a 26.54% success rate. Notably, EchoP requires no additional supervision: the CFC cycle acts as an inductive bias that stabilizes long-horizon planning. Overall, EchoP offers a simple, deployable pathway to improve reliability in safety-critical autonomous driving.
翻译:现代端到端自动驾驶系统存在一个关键缺陷:其规划器缺乏机制来确保预测轨迹与动态场景演化之间的时序一致性。这种自我监督的缺失使得早期预测误差会随时间推移灾难性地累积。我们提出回声规划(EchoP)——一种新型自校正框架,通过构建端到端的"当前-未来-当前"(CFC)循环机制,实现轨迹预测与场景一致性的协调统一。我们的核心洞见在于:合理的未来轨迹应具备双向一致性,即不仅能够从当前观测中生成,还应能反向重构出原始观测状态。CFC机制首先从鸟瞰图(BEV)场景表征预测未来轨迹,随后将这些轨迹逆向映射回当前BEV状态估计。通过循环损失函数强制原始BEV表征与重构表征之间的一致性,该框架能够本质性地惩罚物理不可行或失准的轨迹。在nuScenes数据集上的实验表明,所提方法取得了具有竞争力的性能:相较于单次规划器,L2误差(平均值)降低0.04米,碰撞率下降0.12%。此外,EchoP可无缝扩展至闭环评估(即Bench2Drive平台),成功率达到26.54%。值得注意的是,EchoP无需额外监督信号:CFC循环本身作为归纳偏置有效稳定了长时程规划。总体而言,EchoP为提升安全关键型自动驾驶系统的可靠性提供了一条简洁可部署的技术路径。