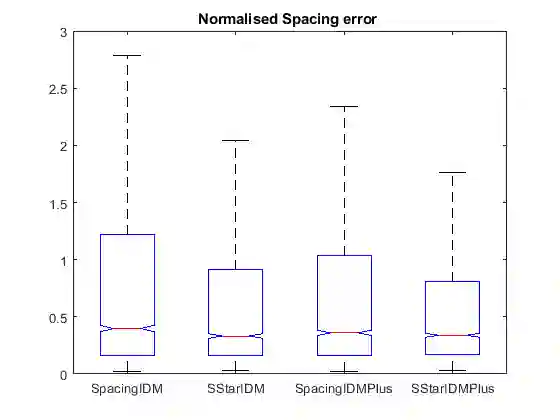
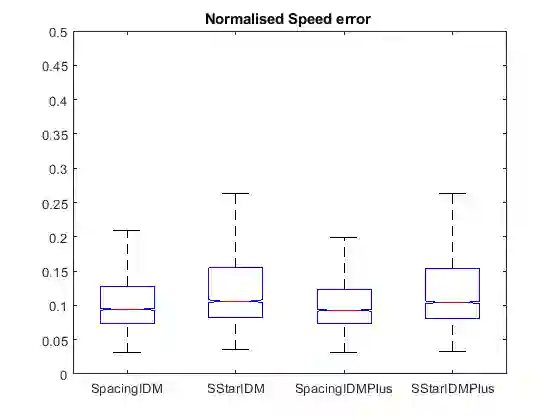
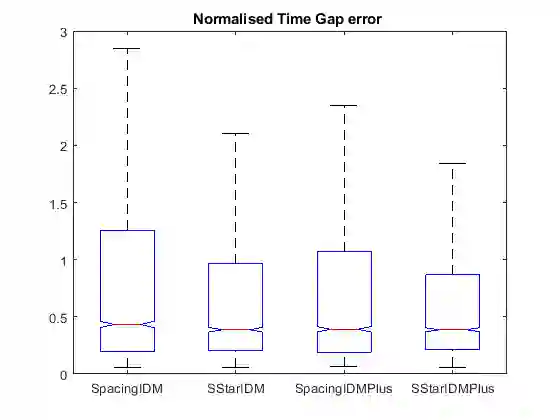
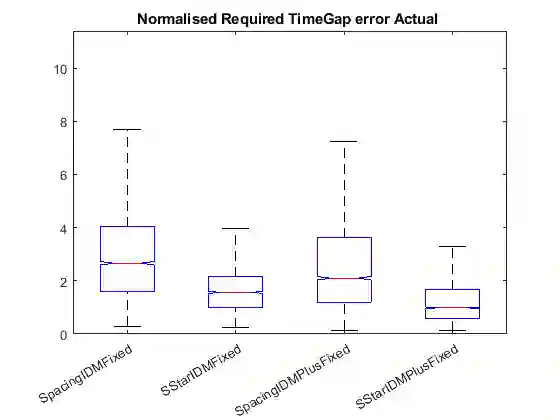
The intelligent driver model (IDM) is one of the most widely used car-following (CF) models in recent years. The parameters of this model have been calibrated using real trajectories obtained from naturalistic driving ,driving simulator experiment and drone data. An important aspect of the model calibration process is defining the main objective of the calibration. This objective, influences the objective function and the performance measure for the calibration. For example, to calibrate CF models, the objective is usually to minimize the error in measured spacing or speed while important safety aspects of the models such as the collision avoidance mechanisms are ignored. For such models, there is no guarantee that the calibrated parameters will preserve the safety properties of the model since they are not explicitly taken into account. To explicitly account for the safety properties during calibration, this paper proposes a simple objective function which minimizes both the error in the actual measured spacing (as it is currently done) and the error in the dynamic safety spacing (desired minimum gap) derived from the collision free property of the IDM model. The proposed objective function is used to calibrate two variants of the IDM using vehicle trajectories obtained with drone from a Dutch highway. The calibration performance is then compared in terms of the error in actual spacing and time gap. The results show that the proposed safety objective 15 function leads to lower errors in spacing and time gap compared to when minimizing for only spacing and preserves collision property of the IDM.
翻译:智能驾驶员模型(IDM)是近年来应用最广泛的跟驰(CF)模型之一。该模型的参数通过自然驾驶数据、驾驶模拟器实验和无人机轨迹数据进行标定。模型标定过程中的一个关键环节是定义标定的主要目标。该目标直接影响标定的目标函数与性能评价指标。例如,当前对跟驰模型进行标定时,通常以最小化实测间距或速度误差为目标,而忽略了模型碰撞规避等关键安全特性。由于未显式考虑安全因素,标定后的参数无法保证保留模型的安全属性。为在标定过程中显式纳入安全特性,本文提出一个简洁的目标函数:该函数同时最小化实际测量间距误差(按现有方法)及基于IDM模型无碰撞特性推导的动态安全间距(期望最小间隙)误差。利用荷兰高速公路无人机获取的车辆轨迹数据,采用所提目标函数对两种IDM变体进行标定,并从实际间距误差与时间间隙误差两个维度对比标定性能。结果表明,相较于仅以间距最小化为目标,所提安全目标函数在间距与时间间隙误差方面均呈现更低水平,且能完整保留IDM的碰撞规避特性。