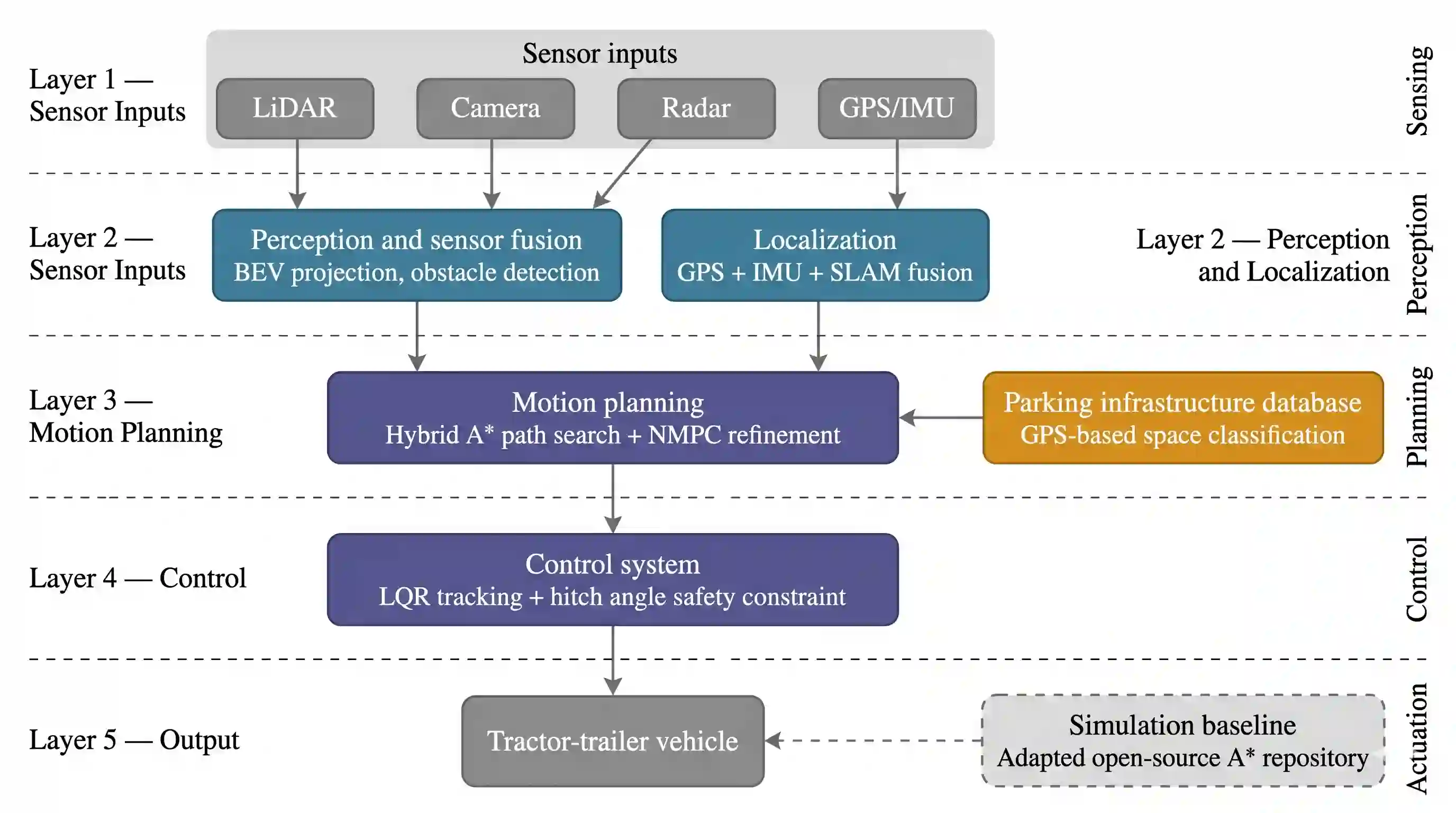
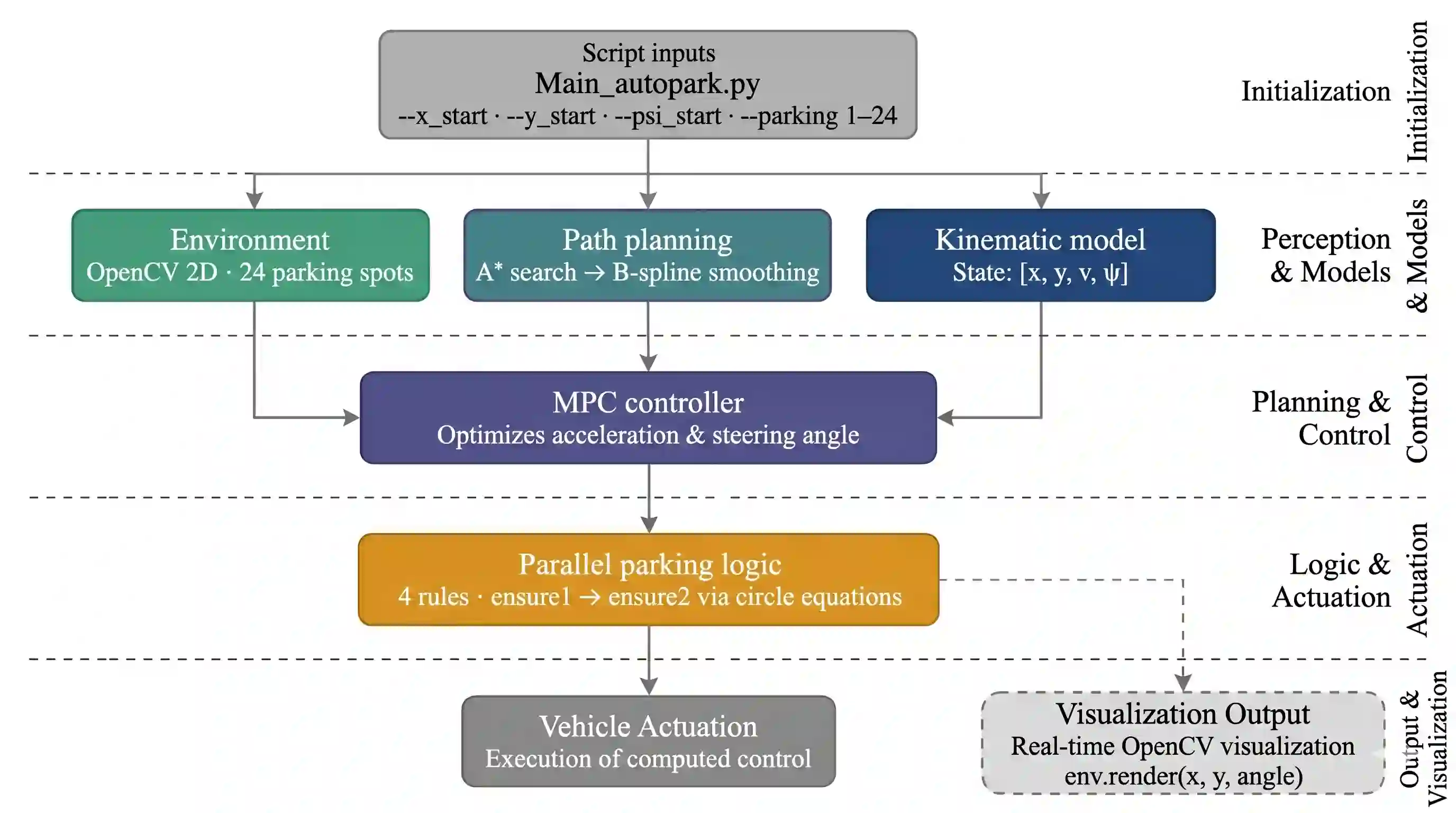
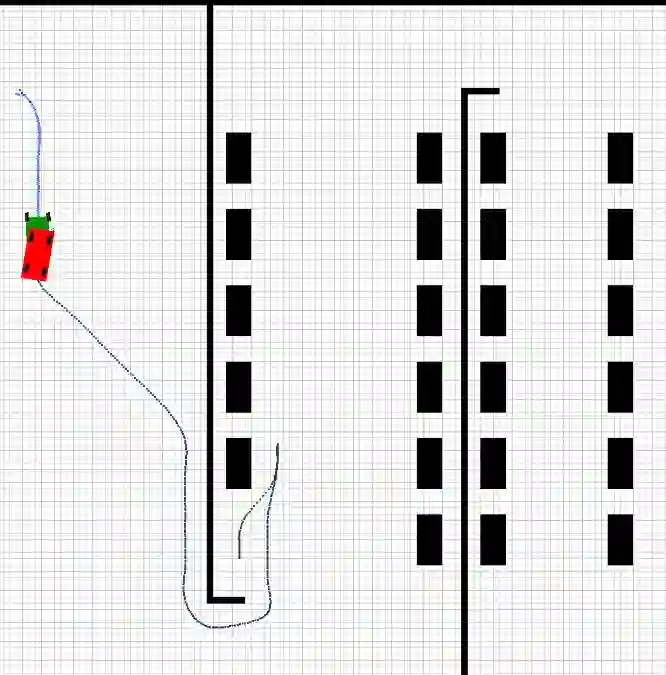
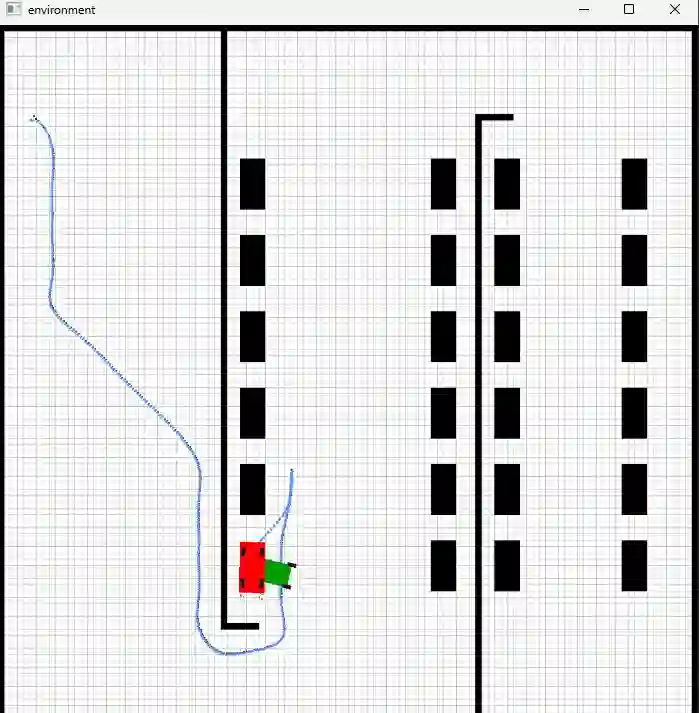
Autonomous driving technology has rapidly evolved over the past decade, offering significant improvements in transportation efficiency, safety, and cost reduction. While much of the progress has focused on highway driving and obstacle avoidance, low-speed maneuvers such as parking remain among the most difficult challenges for autonomous systems. This challenge is especially pronounced in trailer-truck transport vehicles due to their articulated motion and environmental constraints. This paper presents a proposed framework for autonomous truck parking that integrates perception, motion planning, control systems, and infrastructure awareness. By combining sensor fusion, Hybrid A* path planning, nonlinear model predictive control (NMPC), and data-driven parking systems, this work highlights the importance of system-level coordination for reliable and scalable autonomous parking solutions. As a proof-of-concept implementation, we adapted an open-source A* path planning simulation to incorporate a tractor-trailer kinematic model, demonstrating articulated vehicle path planning within a command-line simulation environment, with jackknife prevention identified as an area requiring further development.
翻译:自动驾驶技术在过去十年中迅速发展,显著提升了运输效率、安全性并降低了成本。尽管大部分进展集中于高速公路行驶和避障,但低速操控(如泊车)仍是自主系统面临的最具挑战性的任务之一。这一挑战在拖挂卡车运输车辆中尤为突出,因其铰接式运动和环境约束。本文提出了一种自主卡车泊车的框架,融合了感知、运动规划、控制系统及基础设施感知能力。通过结合传感器融合、混合A*路径规划、非线性模型预测控制(NMPC)及数据驱动泊车系统,本研究强调了系统级协调对于实现可靠且可扩展的自主泊车解决方案的重要性。作为概念验证实现,我们适配了开源A*路径规划仿真,引入牵引车-挂车运动学模型,在命令行仿真环境中演示了铰接式车辆的路径规划,并指出防折叠控制是未来需要进一步发展的方向。