随着机器人在交通、制造、军事、家庭、教育及娱乐等领域的广泛应用,其已深入日常生活。为提升工作效率、避免危险环境伤害或探索难以抵达的区域,适用于不同环境的各类机器人被发明出来。如今,越来越多的任务倾向于使用机器人团队而非单个机器人来达成共同目标。采用多个异构机器人可提升效率、鲁棒性、灵活性、容错性与经济效益,因为即使在部分机器人或设备发生故障时,每个具备特定技能的机器人仍可独立完成任务或协同执行使命。因此,多机器人控制变得比过去数十年更为重要。
尽管已有大量研究提出了构建集中式、分散式与分布式多机器人系统的结构,以及多种协调或多机器人任务分配方法,但其中大多数可能仅适用于特定假设条件下的专门应用。将这些技术整合到不同研究领域通常具有难度。即使某些结构与传统或现代策略可结合以适用于更多应用,但诸如动态环境、最优解、参数形式化及机器人能力参数化等若干挑战仍是NP难题。人工智能方法或可解决此类问题。随着计算机处理速度的不断提升,机器学习方法已在机器人学中普遍应用,但其中仅有少数被用于多机器人任务分配。
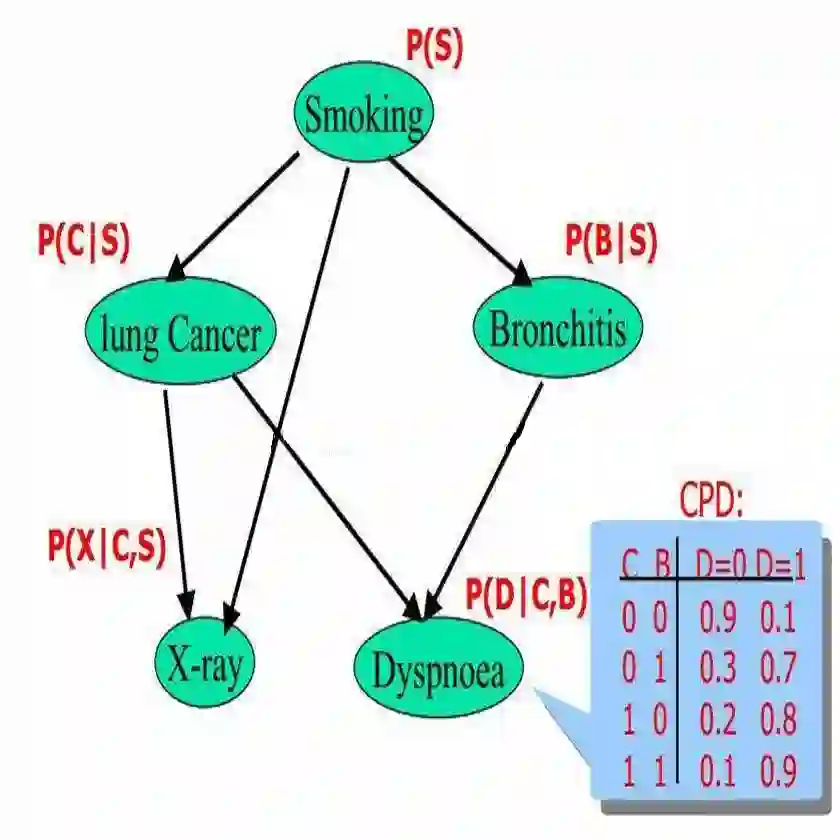
本论文提出一种基于贝叶斯网络的多机器人任务分配新方法,以及一个适用于多机器人系统的通用智能体框架,以克服上述困难。任务的贝叶斯网络可便捷构建,其条件概率表亦可逻辑化建立。任务的成功率可依据贝叶斯定理计算,并可根据收集到的成功率进行恰当的任务分配。在所提出的通用智能体框架中,智能体被分类为不同的代理机构。利用该框架,可构建多样化的多机器人系统,并实现先进的方法论。
为演示多机器人系统构建方法及动态环境下搜救任务中的多机器人任务分配方法,研究采用了低成本的教育硬件机器人。实验结果表明,在训练前进行合理设置,多机器人任务分配的结果可接受;在使用大规模数据集训练后,任务分配结果接近最优。未来,可将此多机器人任务分配新方法应用于静态环境、同构机器人团队、大规模机器人团队及其他类型的多机器人任务分配问题,以分析其可扩展性。研究人员可将各自的前沿方法纳入此通用框架,并将所提出的多机器人任务分配方法结合应用于巡逻、监控、清洁、仓储系统、制造与探索等多种应用场景,以检验其灵活性。