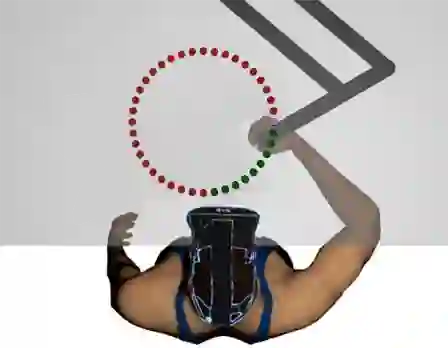
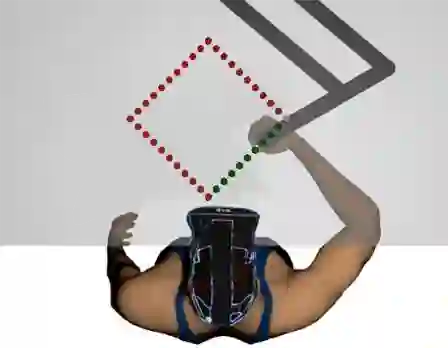
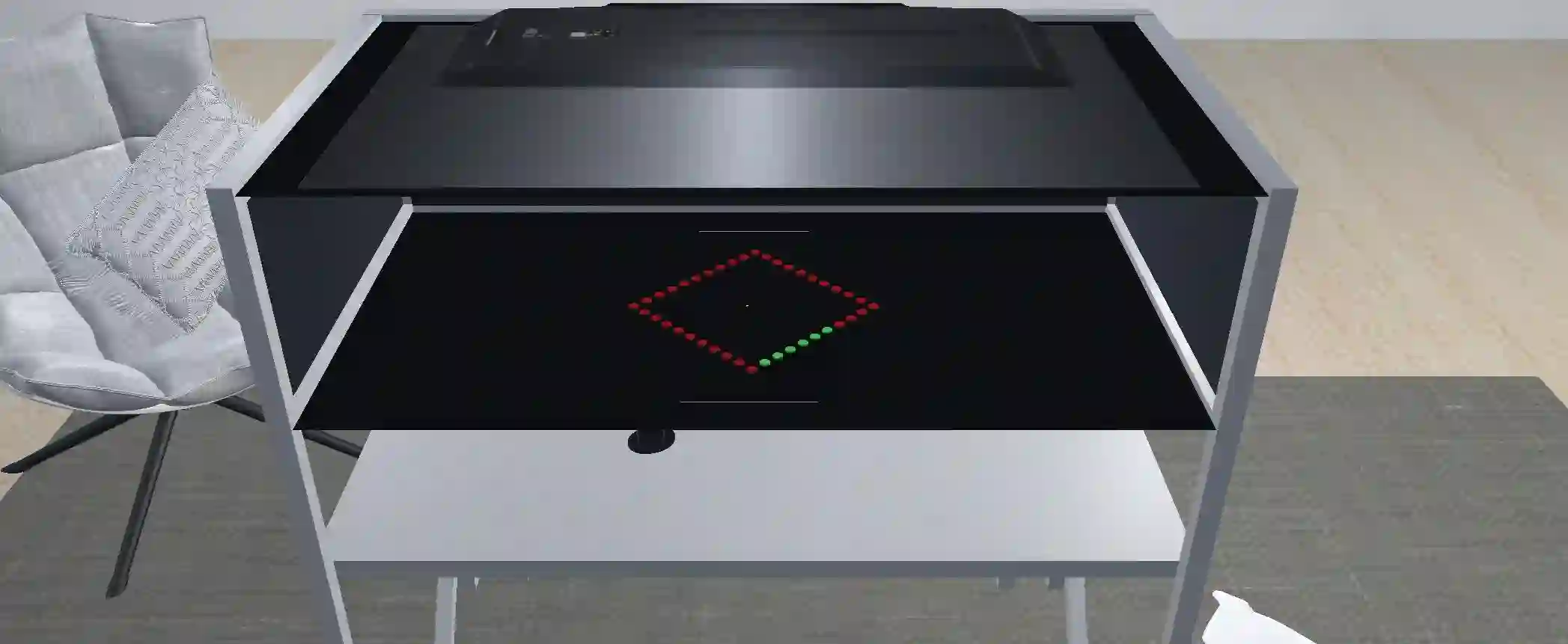
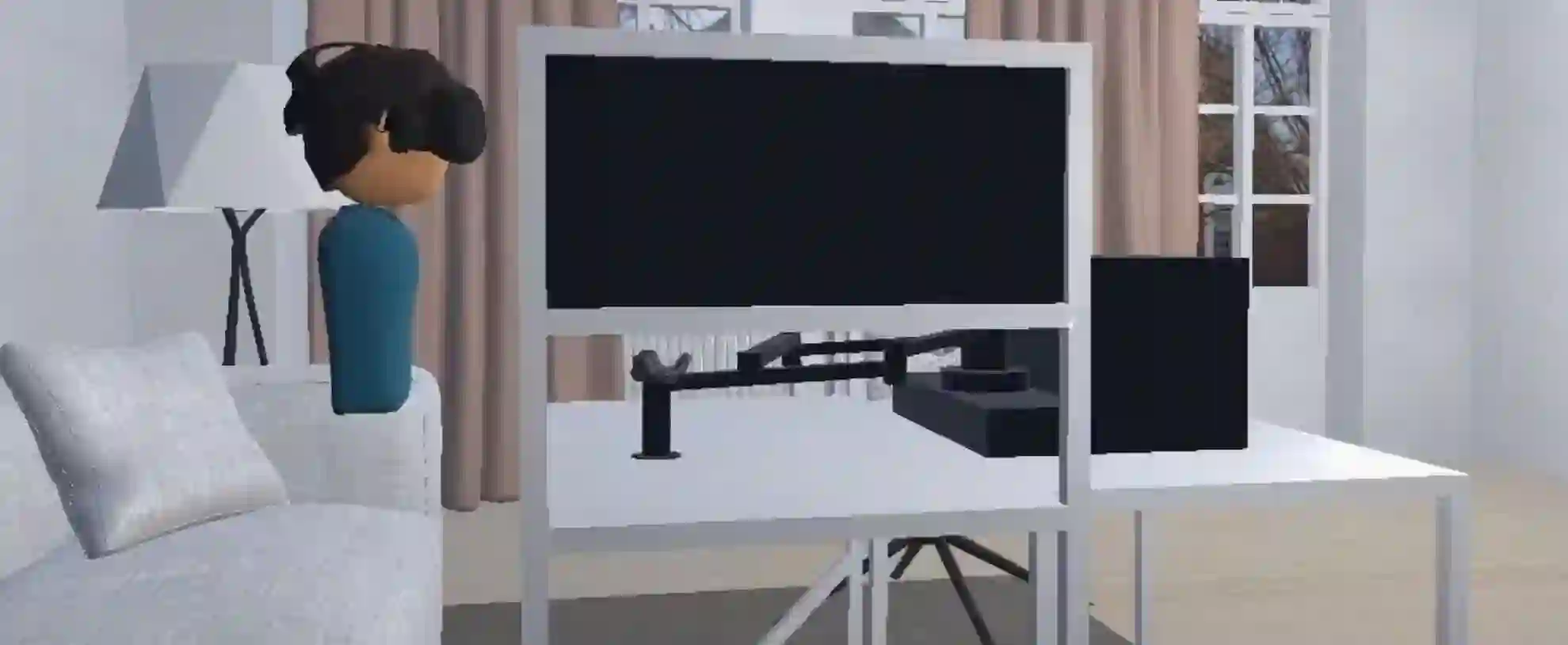
Stroke patients often experience upper limb impairments that restrict their mobility and daily activities. Physical therapy (PT) is the most effective method to improve impairments, but low patient adherence and participation in PT exercises pose significant challenges. To overcome these barriers, a combination of virtual reality (VR) and robotics in PT is promising. However, few systems effectively integrate VR with robotics, especially for upper limb rehabilitation. Additionally, traditional VR rehabilitation primarily focuses on hand movements rather than joint movements of the limb. This work introduces a new virtual rehabilitation solution that combines VR with KinArm robotics and a wearable elbow sensor to measure elbow joint movements. The framework also enhances the capabilities of a traditional robotic device (KinArm) used for motor dysfunction assessment and rehabilitation. A preliminary study with non-clinical participants (n = 16) was conducted to evaluate the effectiveness and usability of the proposed VR framework. We used a two-way repeated measures experimental design where participants performed two tasks (Circle and Diamond) with two conditions (VR and VR KinArm). We found no main effect of the conditions for task completion time. However, there were significant differences in both the normalized number of mistakes and recorded elbow joint angles (captured as resistance change values from the wearable sensor) between the Circle and Diamond tasks. Additionally, we report the system usability, task load, and presence in the proposed VR framework. This system demonstrates the potential advantages of an immersive, multi-sensory approach and provides future avenues for research in developing more cost-effective, tailored, and personalized upper limb solutions for home therapy applications.
翻译:中风患者常出现上肢功能障碍,限制其活动能力及日常生活。物理治疗是改善此类障碍最有效的方法,但患者依从性低及参与度不足构成重大挑战。为克服这些障碍,将虚拟现实与机器人技术相结合应用于物理治疗具有广阔前景。然而,现有系统难以有效融合虚拟现实与机器人技术,尤其是在上肢康复领域。此外,传统虚拟现实康复主要侧重于手部运动,而非肢体关节运动。本研究提出一种新型虚拟康复解决方案,将虚拟现实与KinArm机器人及可穿戴肘部传感器相结合,用于测量肘关节运动。该框架还增强了传统运动功能障碍评估与康复设备(KinArm)的功能。我们开展了面向非临床参与者(n=16)的初步研究,以评估所提出虚拟现实框架的有效性与可用性。采用双因素重复测量实验设计,要求参与者分别在两种条件(VR与VR KinArm)下完成两项任务(圆形与菱形)。研究结果显示,条件因素对任务完成时间无显著主效应。但在圆形与菱形任务之间,标准化错误次数及记录的肘关节角度(以可穿戴传感器电阻变化值表示)均存在显著差异。此外,我们报告了所提出虚拟现实框架的系统可用性、任务负荷及存在感。该实验证明了沉浸式多感官方法的潜在优势,并为开发更具成本效益、个性化及定制化的家庭上肢康复方案提供了未来研究方向。