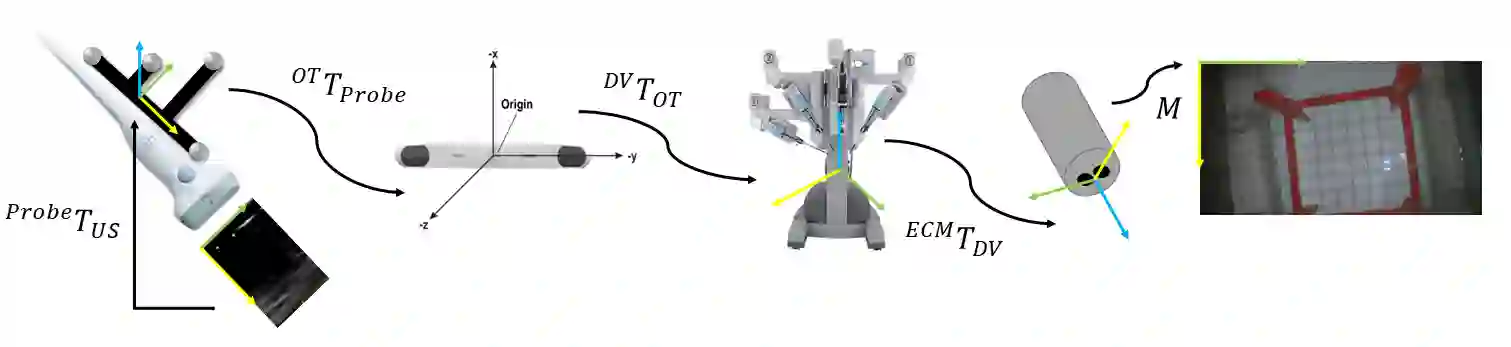
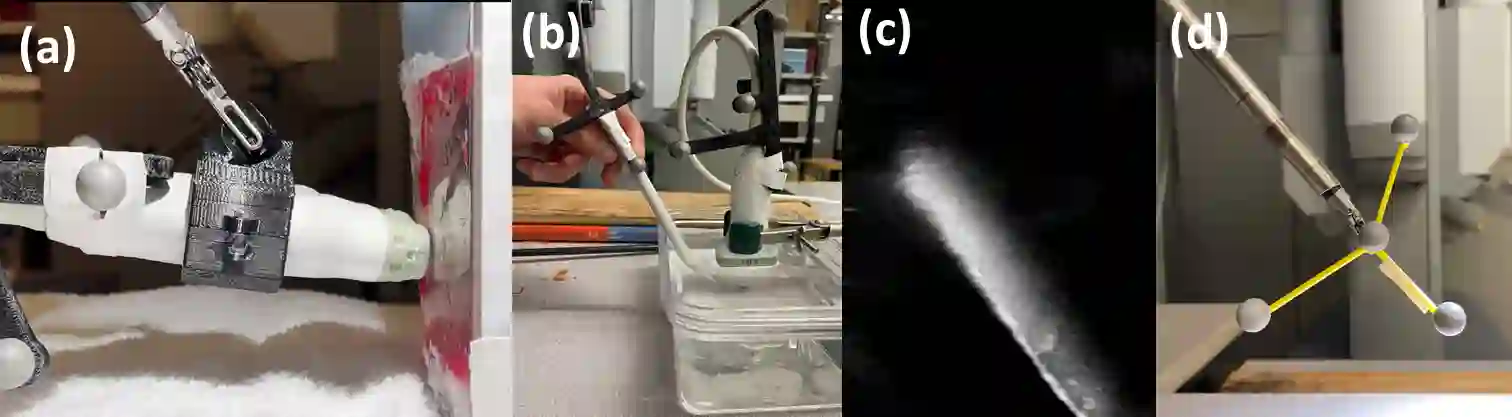
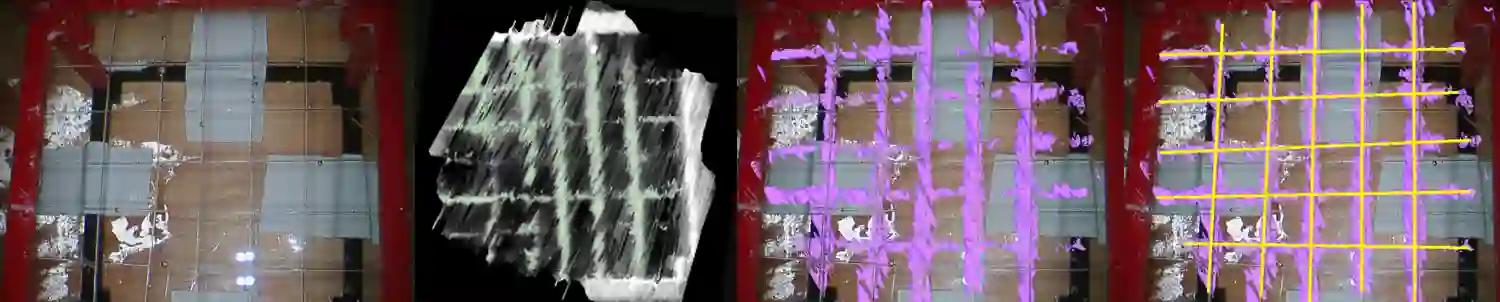
Purpose: Trans-oral robotic surgery (TORS) using the da Vinci surgical robot is a new minimally-invasive surgery method to treat oropharyngeal tumors, but it is a challenging operation. Augmented reality (AR) based on intra-operative ultrasound (US) has the potential to enhance the visualization of the anatomy and cancerous tumors to provide additional tools for decision-making in surgery. Methods: We propose and carry out preliminary evaluations of a US-guided AR system for TORS, with the transducer placed on the neck for a transcervical view. Firstly, we perform a novel MRI-transcervical 3D US registration study. Secondly, we develop a US-robot calibration method with an optical tracker and an AR system to display the anatomy mesh model in the real-time endoscope images inside the surgeon console. Results: Our AR system reaches a mean projection error of 26.81 and 27.85 pixels for the projection from the US to stereo cameras in a water bath experiment. The average target registration error for MRI to 3D US is 8.90 mm for the 3D US transducer and 5.85 mm for freehand 3D US, and the average distance between the vessel centerlines is 2.32 mm. Conclusion: We demonstrate the first proof-of-concept transcervical US-guided AR system for TORS and the feasibility of trans-cervical 3D US-MRI registration. Our results show that trans-cervical 3D US is a promising technique for TORS image guidance.
翻译:目的:采用达芬奇手术机器人的经口机器人手术(TORS)是治疗口咽肿瘤的一种新型微创手术方法,但操作具有挑战性。基于术中超声(US)的增强现实(AR)技术有望增强解剖结构和癌性肿瘤的可视化,为手术决策提供额外工具。方法:我们提出并初步评估了一种用于TORS的超声引导AR系统,将超声探头置于颈部以实现经宫颈视角。首先,我们开展了一项新颖的MRI与经宫颈三维超声配准研究。其次,我们开发了一种结合光学追踪器的超声-机器人标定方法,以及用于在医生控制台内实时内窥镜图像中显示解剖网格模型的AR系统。结果:在水浴实验中,我们的AR系统从超声到立体摄像机的投影平均投影误差分别为26.81像素和27.85像素。MRI与三维超声的平均目标配准误差:三维超声探头为8.90毫米,自由手三维超声为5.85毫米,血管中心线平均距离为2.32毫米。结论:我们展示了首个经宫颈超声引导AR系统用于TORS的概念验证,并证实了经宫颈三维超声-MRI配准的可行性。研究结果表明,经宫颈三维超声是一种有前景的TORS图像引导技术。