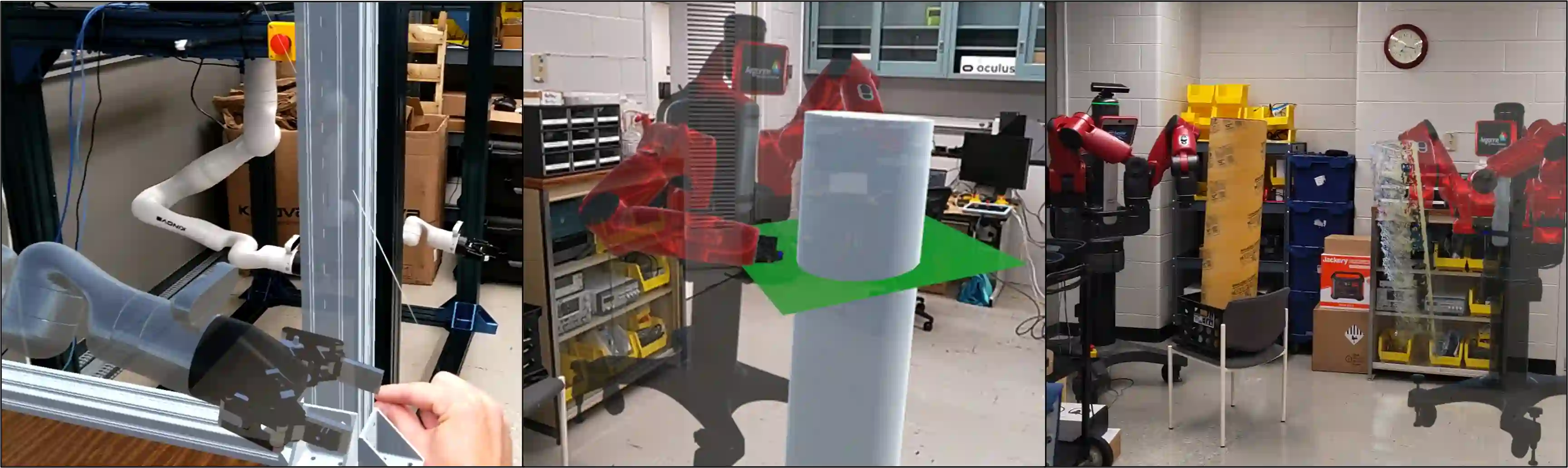
In nuclear isotope and chemistry laboratories, hot cells and gloveboxes provide scientists with a controlled and safe environment to perform experiments. Working on experiments in these isolated containment cells requires scientists to be physically present. For hot cell work today, scientists manipulate equipment and radioactive material inside through a bilateral mechanical control mechanism. Motions produced outside the cell with the master control levers are mechanically transferred to the internal grippers inside the shielded containment cell. There is a growing need to have the capability to conduct experiments within these cells remotely. A simple method to enable remote manipulations within hot cell and glovebox cells is to mount two robotic arms inside a box to mimic the motions of human hands. An AR application was built in this work to allow a user wearing a Microsoft HoloLens 2 headset to teleoperate dual arm manipulators by grasping robotic end-effector digital replicas in AR from a remote location. In addition to the real-time replica of the physical robotic arms in AR, the application enables users to view a live video stream attached to the robotic arms and parse a 3D point cloud of 3D objects in their remote AR environment for better situational awareness. This work also provides users with virtual fixture to assist in manipulation and other teleoperation tasks.
翻译:在核同位素与化学实验室中,热室和手套箱为科学家提供了受控且安全的实验环境。在这些隔离屏蔽室中进行实验操作需要科学家亲临现场。当前热室作业中,科学家通过双侧机械控制机构对内部设备和放射性材料进行操作:外部主控手柄产生的动作通过机械传动系统传递至屏蔽室内部的机械夹爪。当前亟需实现远程操控这些屏蔽室进行实验的能力。一种简便的热室/手套箱远程操控方案是在箱体内部安装两只机械臂来模拟人手的运动。本研究构建了一款增强现实应用,允许佩戴Microsoft HoloLens 2头显的用户在增强现实环境中通过抓取机器人末端执行器的数字孪生体,从远程位置遥操作双臂机械手。除实时呈现物理机械臂的增强现实副本外,该应用还能让用户查看机械臂附带实时视频流,并通过解析远程增强现实环境中的三维点云数据增强态势感知能力。本研究同时为操作者提供虚拟夹具,以辅助机械操作及其他遥操作任务。