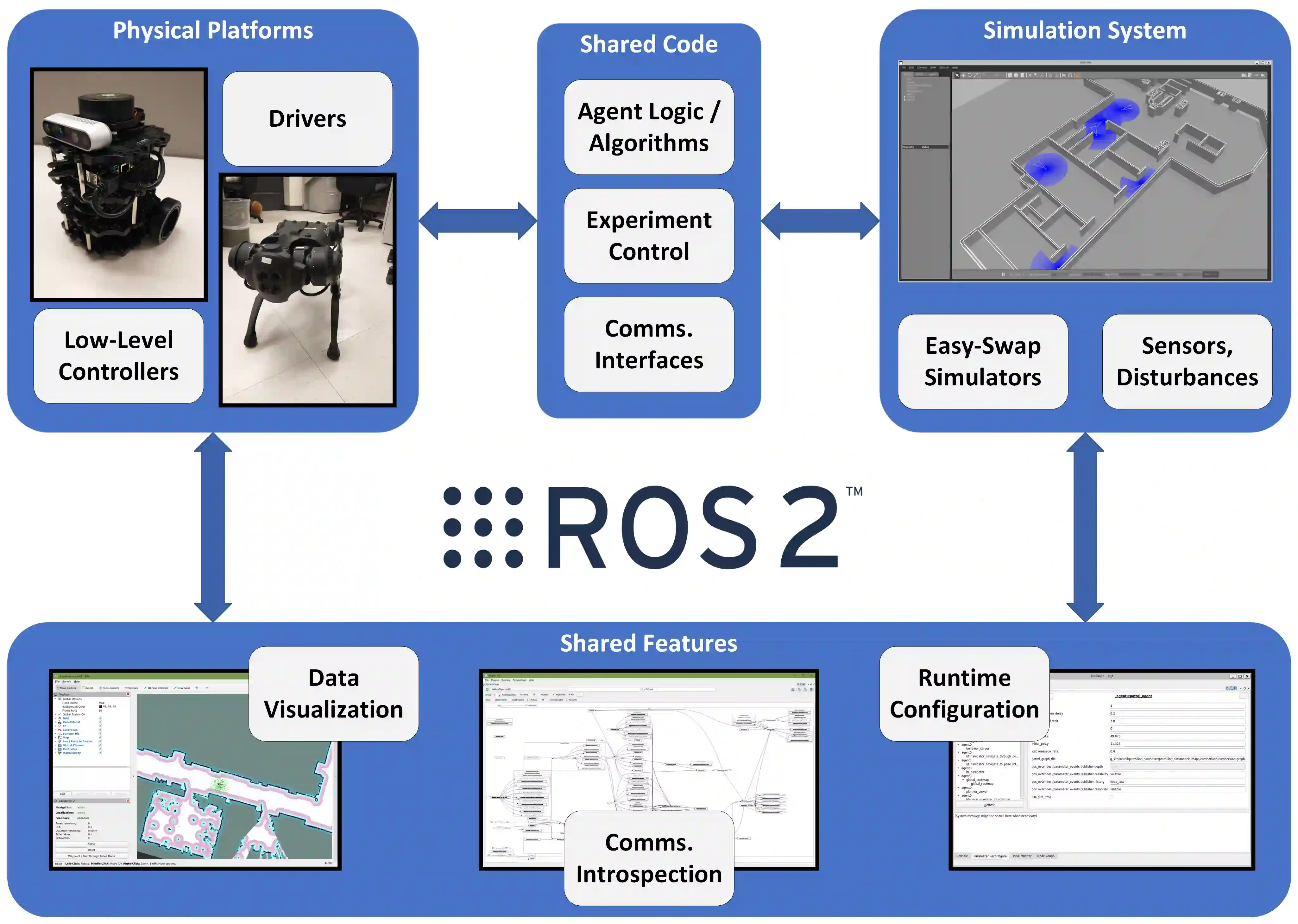
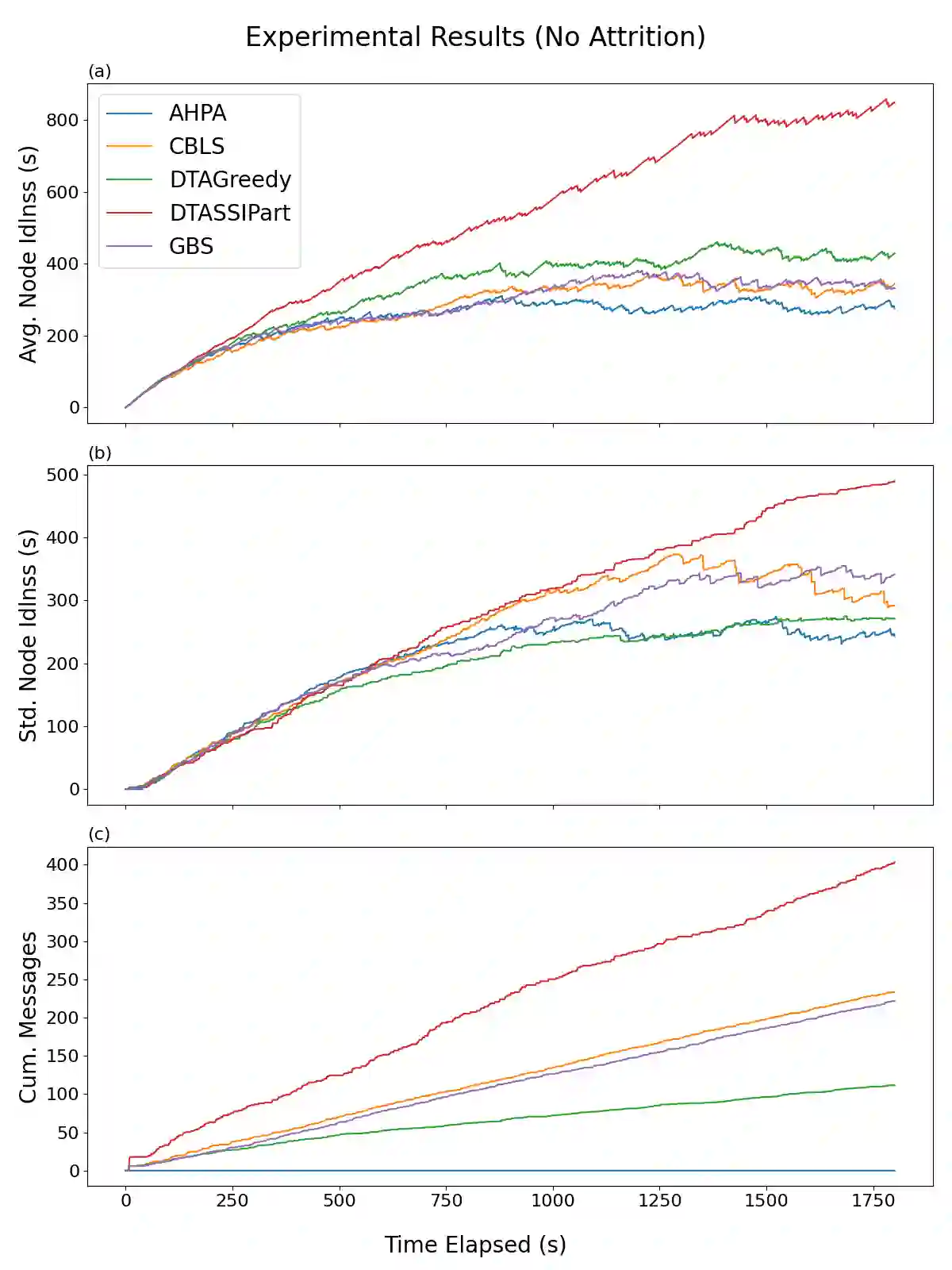
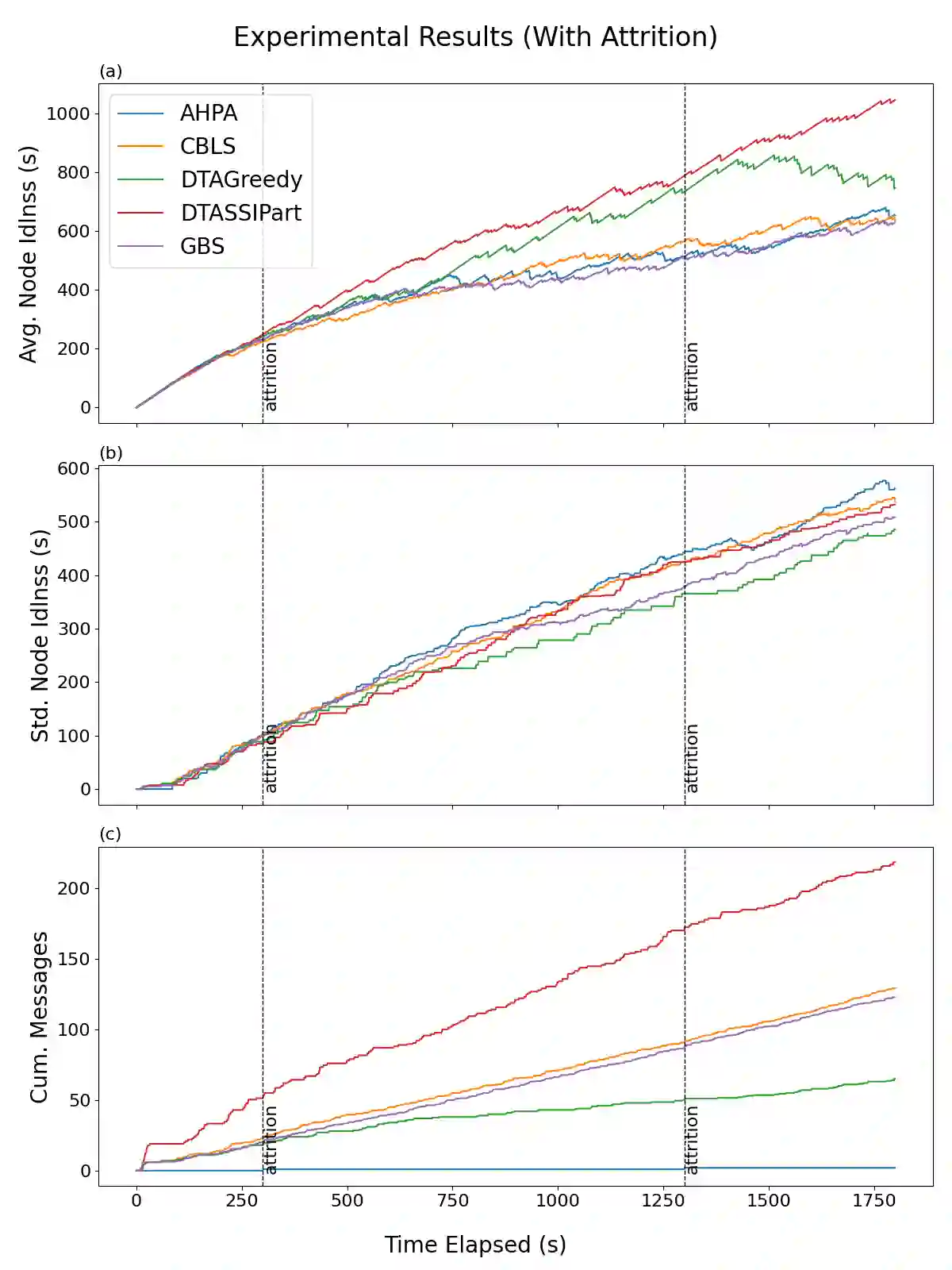
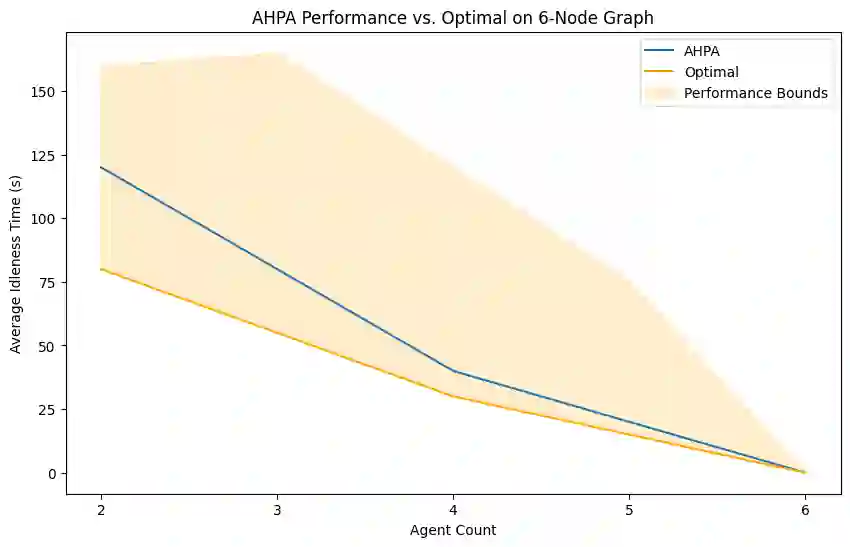
Multi-agent patrolling is a key problem in a variety of domains such as intrusion detection, area surveillance, and policing which involves repeated visits by a group of agents to specified points in an environment. While the problem is well-studied, most works do not provide performance guarantees and either do not consider agent attrition or impose significant communication requirements to enable adaptation. In this work, we present the Adaptive Heuristic-based Patrolling Algorithm, which is capable of adaptation to agent loss using minimal communication by taking advantage of Voronoi partitioning, and which meets guaranteed performance bounds. Additionally, we provide new centralized and distributed mathematical programming formulations of the patrolling problem, analyze the properties of Voronoi partitioning, and finally, show the value of our adaptive heuristic algorithm by comparison with various benchmark algorithms using a realistic simulation environment based on the Robot Operating System (ROS) 2.
翻译:多智能体巡逻是入侵检测、区域监控及治安巡逻等领域的关键问题,涉及智能体群体对环境中特定地点的重复访问。尽管该问题已得到充分研究,但现有工作大多未能提供性能保障,且要么未考虑智能体减员情况,要么要求具备高通信开销以实现自适应能力。本研究提出基于启发式的自适应巡逻算法,该算法通过利用沃罗诺伊分区,以极少的通信开销实现智能体损失后的自适应,并满足有保障的性能边界。此外,我们提出了该巡逻问题的集中式与分布式数学规划新模型,分析了沃罗诺伊分区的性质,并最终基于机器人操作系统(ROS)2构建的逼真仿真环境,通过与多种基准算法对比,验证了所提自适应启发式算法的有效性。